Le kit EZ
Goto to de Romer
Cette (longue) page décrit le
kit
Ez Goto de la société US Romer et son adaptation à notre télescope
Dobson Strock 250.
Rappelons
que ce kit, pour un prix modéré, (environ 150 €) permet d'ajouter une
fonction "Goto" et tracking a un télescope Dobson :
On peut passer une nuit d'observation sans toucher le télescope !.
Nota : les constructeurs qui propose des Goto pour Dobson : (si vous avez d'autres références, merci de les transmettre) 
- Romer Optics
- Sidereal Technology
- Stellarcat
- TeenAstro
Il ne faut
pas confondre ce kit Romer Optics avec le kit
Ez Push to de Romer dont nous
décrivons l'installation sur cette page : ezpushto.htm
Nota : le site
de Romer
ne donne pas beaucoup de renseignements, on en trouve un peu plus sur
sa page Facebook... et sa dernière doc : https://cdn.shopify.com/s/files/1/1023/8189/files/EZ_GOTO_LITE_KIT.pdf?v=1666636270
Nota : le kit
Ez Push to consomme autour de 10 mA. Le
kit
Ez Goto consomme (à cause des moteurs) autour de 1 A (selon les réglages) : 100 fois plus...
Attention : si vous souhaitez installer ce kit sur votre Dobson :
- Il faut disposer d'un téléphone ou d'une tablette Android avec un peu de puissance.
- Il faut savoir bricoler un minimum : un peu d'électronique, de mécanique et d'informatique...
- Il faut commencer par le plus délicat : la mécanique du mouvement d'altitude
: trouver une solution pour entrainer (en altitude) le télescope avec
un moteur pas à pas. Il faut que le
télescope soit suffisamment équilibré. Le couple d'entrainement doit
être suffisamment faible ce qui peut nécessiter de remplacer les patins
Teflon par des roulements à billes. A notre avis, il faut résoudre ce
problème avant de passer à la suite (on peut le tester sans le kit).
Eric Romer recommande un Nema 17 pour les télescopes de 200 à 400
et un Nema 23 pour les télescopes de plus de 300.
- Il faut ensuite trouver une solution au
mouvement d'azimut
(en général, c'est plus simple) avec un moteur pas à pas. Le couple
d'entrainement doit être suffisamment faible. Ça peut être un problème
si le télescope est lourd (miroir de 300 ou plus). Sinon, je donne une
astuce vers la fin de cette page pour diminuer le couple. Je suggère de
résoudre ce problème
avant de passer à la suite
- Il faut installer 2 contrôleurs (un boitier relié au
moteur pas à pas qui envoie les impulsions et les micropas corrects).
Pour le kit EzGoto, les "petits" contrôleurs de type TB6600 ont 32
micropas : c'est insuffisant (sauf pour le focuseur optionnel). Il est nécessaire d'avoir 256 micropas
: DM542 ou DM556 autour de 15 € pièce. (Ces contrôleurs fonctionnent en 24V)
- On peut alors commander, installer et tester le kit
Ez Goto et l'application gratuite Android EzGoto pour le faire marcher. (Je recommande d'installer l'application même sans le kit, juste pour voir à quoi ça ressemble).
- En option on peut rajouter un moteur pour le
focuseur pour la mise au point. Je recommande de le faire une fois le
reste réalisé.
- En option, on peut rajouter un convertisseur faible coût
12V -> 24V si on veut alimenter le télescope depuis une batterie 12V
ou la batterie de la voiture.
- Éric Romer, (le vendeur du kit) propose une option (qui
nécessite un relais et un peu de câblage sur les contrôleurs) pour modifier dynamiquement
le nombre de micropas ce qui permet d'avoir un télescope rapide ET
précis (nécessaire uniquement pour ceux qui trouverait que le kit Ez Goto sans l'option est trop lent. (Voir à la fin de cette page). Je recommande de le faire une fois le reste réalisé.
Pour la précision du Ez Goto, c'est la même que celle du Ezpushto, c'est à dire :
La précision de l'angle est entre 0.1° et 0.05° : c'est très précis.
Ceci dit, pour obtenir cette précision il faut calibrer soigneusement sur au moins 4 ou 5 étoiles (ou objets) écartées.
On trouve l'objet dans le champ d'un oculaire "moyen"
Après, si on cherche un objet
difficile, on peut toujours se caler sur une étoile proche et rajouter
une calibration (offset) sur cette étoile.
Principe
:
La société US (Texas) Romer Optics propose à la vente un kit
Ez Goto pour Dobson à 150$. (plus frais de port...)
.
Attention : pour 150 $, Romer ne
fournit que la partie encadrée en blanc :

.
Mais pour un bricoleur, ça peut suffire...
Et pour les super bricoleurs ou ceux qui veulent transformer leur kit
Ez Push to en kit
Ez Goto, Romer propose un Ez goto Upgrade pour 85$ (plus frais port)
qui comprend :
- La carte EzGoto
- Les câbles avec le connecteur
- L'aimant cylindrique
- La tôle de centrage de l'aimant
.
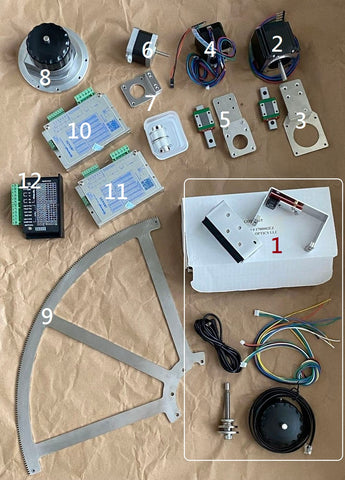
Le kit Ez Goto ressemble beaucoup au kit
Ez Push to mais ce n'est pas le même (même module Bluetooth) :
Il est constitué de :
- Un module d'azimut :
Circuit imprimé de l'ancienne version 2019 :

.
Nouvelle version 2021 :
.

.
.
.
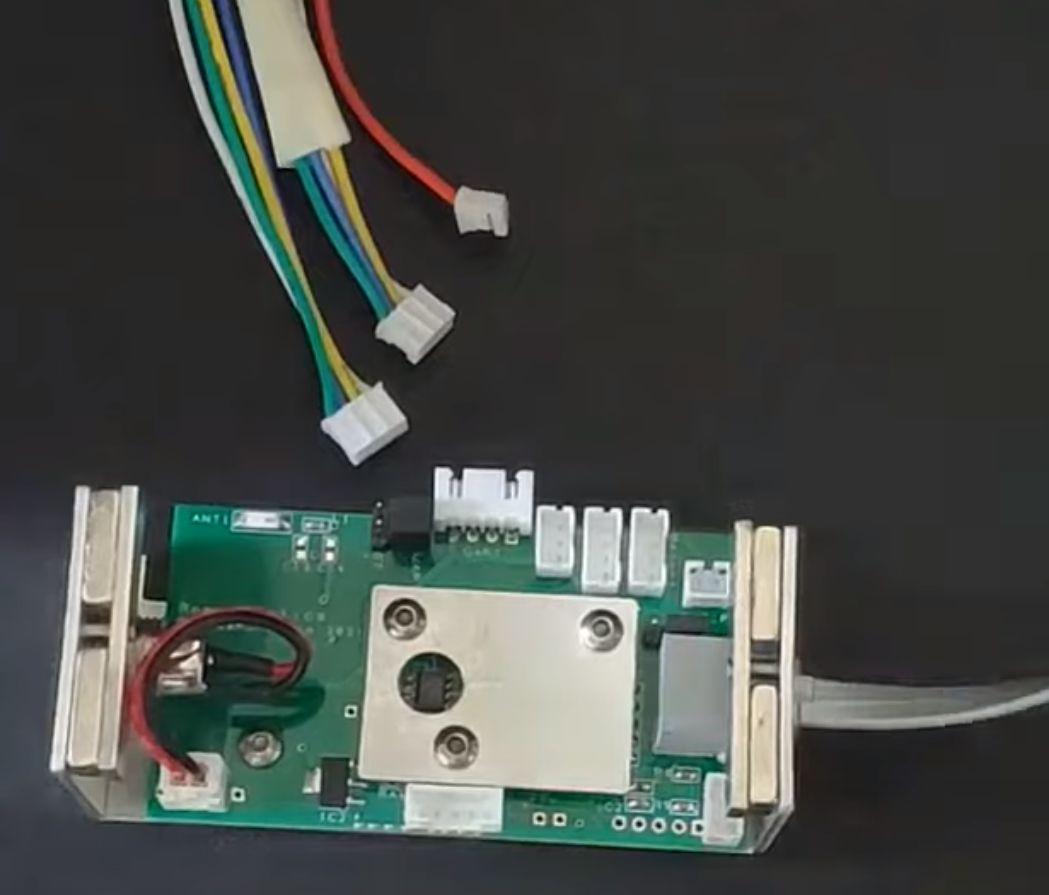
Module d'azimut qui ressemble à celui du kit
Ez Push to, qui contient le même capteur magnétique AS5600
: le petit circuit intégré noir au fond du trou de la plaque aluminium
(par lequel passe l'aimant fourni). Mais des connecteurs en plus :
- Connecteur 2b (gnd +, blanc en bas à gauche) alimentation 5 à 15V
relié au connecteur Jack (à gauche) pour le câble USB livré (comme le kit
Ez Push to)
- Connecteur 6b RJ45 (gris à droite) pour le câble RJ45 gris, relié au
module Altitude (comme le kit
Ez Push to)
- Connecteur 2b (gnd +, blanc en haut à droite) Ref à relier sur l'alimentation des contrôleurs
de moteur. (Qui doivent être alimentés de leur côté)
- Cavalier 3b noir à côté du RJ45 : alimentation moteurs
interne ou externe
- Connecteur 4b AZ (gnd pulse dir enable, blanc haut à droite) à relier
au contrôleur
du moteur azimut
- Connecteur 4b ALT (gnd pulse dir enable, blanc haut à droite) à relier
au contrôleur
du moteur Altitude
- Connecteur 3b Focuser (gnd pulse dir, blanc en haut) à relier (en
option) au contrôleur
du moteur du focuser
- Connecteur 4b (gnd rx tx 3.3V) GRTV (blanc en haut) pour une liaison
série (à la place du Bluetooth)
- 3 cavaliers (noirs, en haut à côté du connecteur GRTV) de réglage
Bluetooth ou RS232 (liaison série)
- Connecteur 5b ST4CCD guidings ports (en bas) qui touche la tôle du
capteur
- Connecteur 3b IR Sensor en bas à droite pour une télécommande
infrarouge ou la commande du relais Dual Speeds
- Un module d'altitude que je
soupçonne être le même que celui du Ez
Push to (capteur magnétique AS5600) relié au module d'azimut par le câble RJ45
gris fourni.
- Accessoires : un cordon USB
d'alimentation noir, un câble RJ45 gris, des câbles et accessoires et des
vis à peu près comme le Ez
Push to.
Nota : rappelons que les deux
modules Azimut et Altitude du kit
Ez Goto, comme le kit
Ez Push to, sont basés sur des circuits
intégrés capteurs de champ
magnétique AS5600. Chaque module contient un de ces circuits
intégrés, en face d'un trou dans une
tôle d’aluminium. Par ce trou passe un aimant cylindrique (M4) (fourni
dans le kit) fixé à l'axe du télescope. Quand le télescope tourne, il
entraîne cet aimant, la rotation du champ magnétique est détectée par le capteur avec une précision d'environ 0.1 °. L'aimant
doit être à moins de 2 mm du capteur (il peut le toucher). Cette solution
fournit une réponse simple pratique (facile à démonter) et précise à la
mesure d'angle.
On peut monter ce kit et s'en servir comme
d'un Ez Push to... si on n'installe pas les moteurs...
Nota
: comme pour le kit
Ez Push to, les 2 modules du kit
Ez Goto sont fixés par des aimants sur le télescope (Les aimants,
les plaques en acier et les vis sont fournies).
Description
(traduction libre du site
de Romer) :
Le kit
permet de transformer un télescope Dobson du commerce : Apertura AD,
Zhummell Z, Orion Skyline... ou un télescope Dobson "maison" pour lui
ajouter une fonction de pointage et de tracking automatique motorisé.
Nota : le site
de Romer
ne donne pas beaucoup de
renseignements, on en trouve un peu plus sur sa page Facebook...
Le kit
permet :
- Fonction de "Auto Goto"
- Tracking (sur l'objet pointé ou sur n'importe quel objet visé)
- Déplacement "micro motion" pour ajuster précisément l'objet dans
l'oculaire
- Déplacement "Push to" manuel en poussant le télescope sans les moteurs
Nota
: étant donné que le kit
Ez Goto est équipé des mêmes capteurs
magnétiques angulaires que le kit
Ez Push to, si
- Les courroies ne sont pas crantées
- La couronne n'est pas tout à fait circulaire
- La courroie crantée saute (un peu)
- On pousse le télescope à la main
- Le moteur patine (un peu) ou perd des pas
- On utilise des moteurs à courant continu
- ...
Ce n'est pas un problème : les capteurs continuent de fonctionner et compensent avec
une précision de l'ordre de 0.1°.
Actuellement
il fonctionne avec :
- L'application
Android Romer gratuite EZgoto. Info 03/07/2022 : la version actuelle
est en cours de développement et son fonctionnement n'est pas garanti
sur tous les matériels Android. La version définitive va sortie bientôt
sortir.
- La cible jaune : "System alignment" : ?.
- Les 2 engrenages gris "Push to by hand" : permettent d'embrayer
ou non les moteurs pas à pas (il n'y a malheureusement pas de rappel
visuel de l'état : embrayé ou non), pour, par exemple, orienter
manuellement le télescope.
- Le télescope vert "All time goto" : permet de suivre l'objet pointé
- L'engrenage rouge "Emergency stop" : stoppe les moteurs
- Les 4 flèches rouge fond blanc permet de déplacer l'azimut et l'altitude
- Le rond rouge stoppe le déplacement et maintient le suivi
- Les flèches AZ TRACK et ALT TRACK ?
- Pour l'instant, nous n'utilisons pas le FOCUSER

- La version IOS Apple sera disponible "plus tard dans l'année" (info Romer de juillet 2022)
- Le logiciel PC Windows gratuit Stellarium.
Le kit est compatible avec les télescopes Dobson de
8" (200mm) à 16" (400mm). (D'après Romer). Question : pourquoi pas plus
grand ou plus petit ?
- Vous pouvez pousser, sans les moteurs, le
Dobson sur n'importe quel objet intéressant du ciel et assurer le suivi
- Vous pouvez utiliser la fonction Goto pour trouver automatiquement (moteurs) n'importe quel objet
- Vous pouvez déplacer électriquement (moteurs) le
télescope avec l'application
- Vous pouvez centrer précisément l'objet dans l'oculaire avec les moteurs
en micro déplacements avec l'application
- Vous pouvez faire une mise au point électrique avec l'application si
votre porte oculaire est motorisé
- Le système fonctionne comme un système "Push to" comme le kit
Ez Push to si les moteurs ne sont pas
montés ou pas alimentés
Attention
: par défaut le kit ne contient pas les contrôleurs,
moteurs,
mécanique, courroies...
Les "petits" contrôleurs TB6600 comme celui-là :

ne sont pas suffisants : ils ne
proposent que 32 micropas ce qui est insuffisant. (Sauf pour la
commande optionnelle du focuseur pour ceux qui souhaitent une mise au
point électrique sans toucher le télescope)
Il est nécessaire d'utiliser des contrôleurs 256 micropas comme : DM542 ou DM556)
Environ 15 € pièce :

Dans la version prévue par Romer, les moteurs sont reliés
par un système à friction (ce qui permet de pousser aussi le télescope à
la main : pas de batterie...) pour l'Azimut et l'Altitude.
Avec un 3e connecteur, on peut brancher un focuser électrique (dont le moteur pas à pas
est toujours activé...)
En reliant tout ça, en Bluetooth, à un PC muni du logiciel Stellarium,
ou de l'application Android
Ez Push to Romer (rien pour
l'instant sur IOS), on peut piloter le télescope qui, une fois calibré, va
chercher tout seul les objets et les suivre.
Évidemment, il faut bricoler quelques trucs, moyennant quoi, pour
seulement 50$ de plus que le kit
Ez Push to, on a un Goto... (Mais il
faut acheter les moteurs et les contrôleurs)
Plus besoin de table équatoriale, puisque le système fait du tracking
électrique...
Liens :
Vidéos :
Facebook :
https://fr-fr.facebook.com/pages/category/Home-Improvement/Romer-Optics-Limited-Company-1704227106468587/
Évidemment, si vous avez d'autres infos,
merci de me les communiquer...
Comment
installer ce kit Ez Goto sur notre Télescope
Dobson Strock 250 ?
Pour installer le kit Ez Goto :
- Il faut d'abord installer les capteurs d'angles
(Azimut et altitude) ce que nous avons déjà fait
sur notre Strock
250.
- Il
faut ensuite trouver une solution pour motoriser l'axe Altitude avec un
moteur pas à pas (Voir un peu plus bas)
- Il
faut alors trouver une solution pour motoriser l'axe Azimut avec un
moteur pas à pas : nous allons installer un moteur pas à pas
fixé dans un coin, à l'intérieur du rocker du Strock 250,
axe vers le bas. Ce moteur, muni du pignon cranté adéquat, entraîne une
courroie crantée 6mm (style imprimante 3D). Cette courroie est "enroulée"
autour de notre disque (jaune) sandwich qui sert de support de glissement
aux 3 patins Téflon.

- Problème le sandwich fait 3 mm d'épaisseur, ce qui est insuffisant. Il
faut rajouter
- Sur le bord du disque, une couronne ou des picots de 5 ou 6mm
- Solution proposée par Romer :
Motorisation
Altitude :
- Solution proposée pour
motoriser l'axe de l'altitude :
- Visser (aux extrémités de la hache) et coller le long et sur les
côtés (néoprène) une courroie crantée directement sur l'aluminium
(dégraissé) d'une des haches existantes côté extérieur
- Supprimer 1 patin Téflon du côté moteur
- Découper (passage de la hache et du pignon) et percer (moteur et
fixation) un profilé aluminium suffisamment solide (ici
50x20e2) pour recevoir un "petit" moteur pas à pas
Nema17 axe Ø5 pignon cranté standard
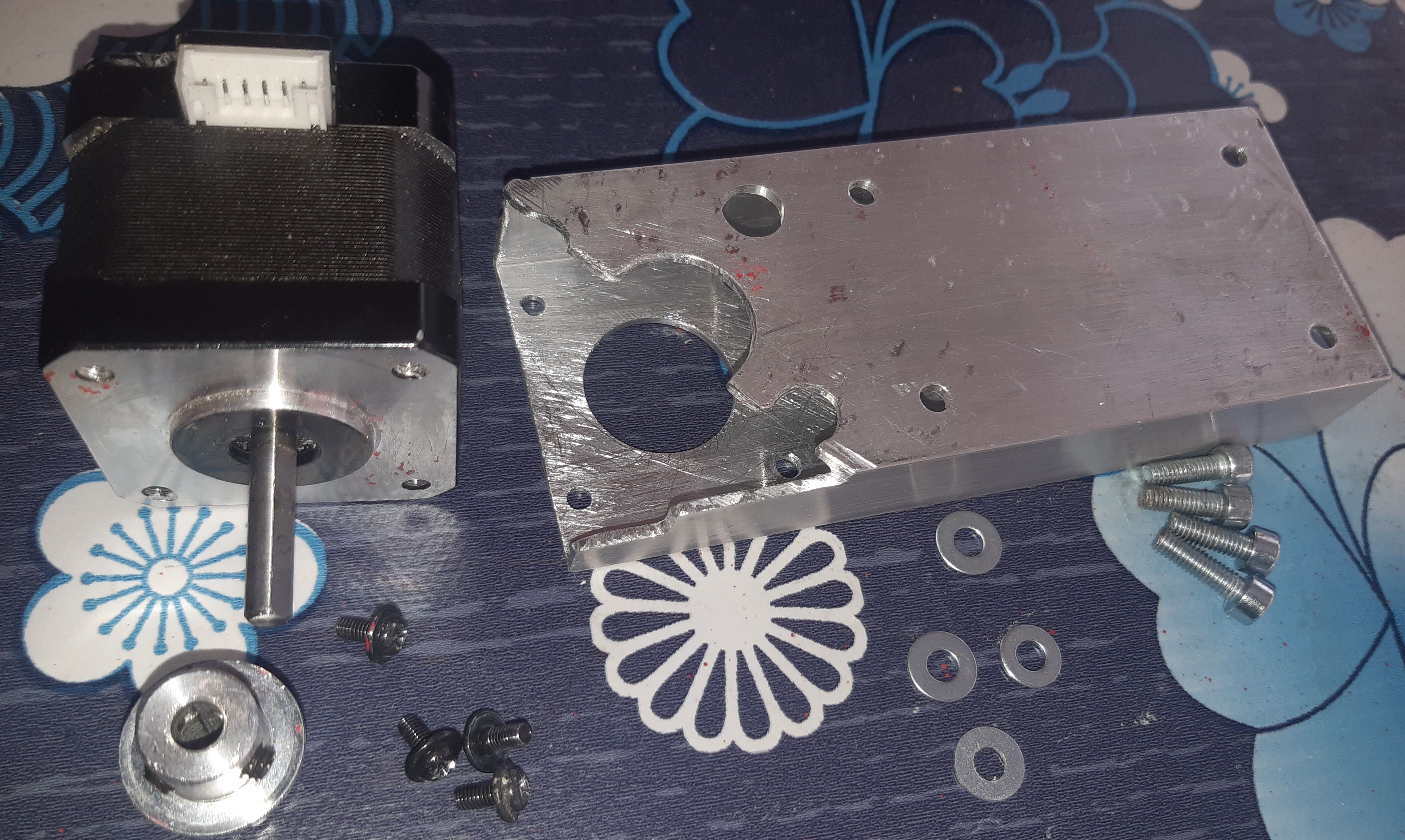
- Monter par 4 vis le moteur Nema 17 sur le
profilé
- Découper la hache pour le passage du pignon
- Fixer, sur le côté du rocker, par 4 vis Chc M4x12 et 4 écrous M4
noyés collés côté intérieur du rocker. (Les trous dans le profilé
servent à laisser passer les vis M4, les rondelles et la clef Chc) :

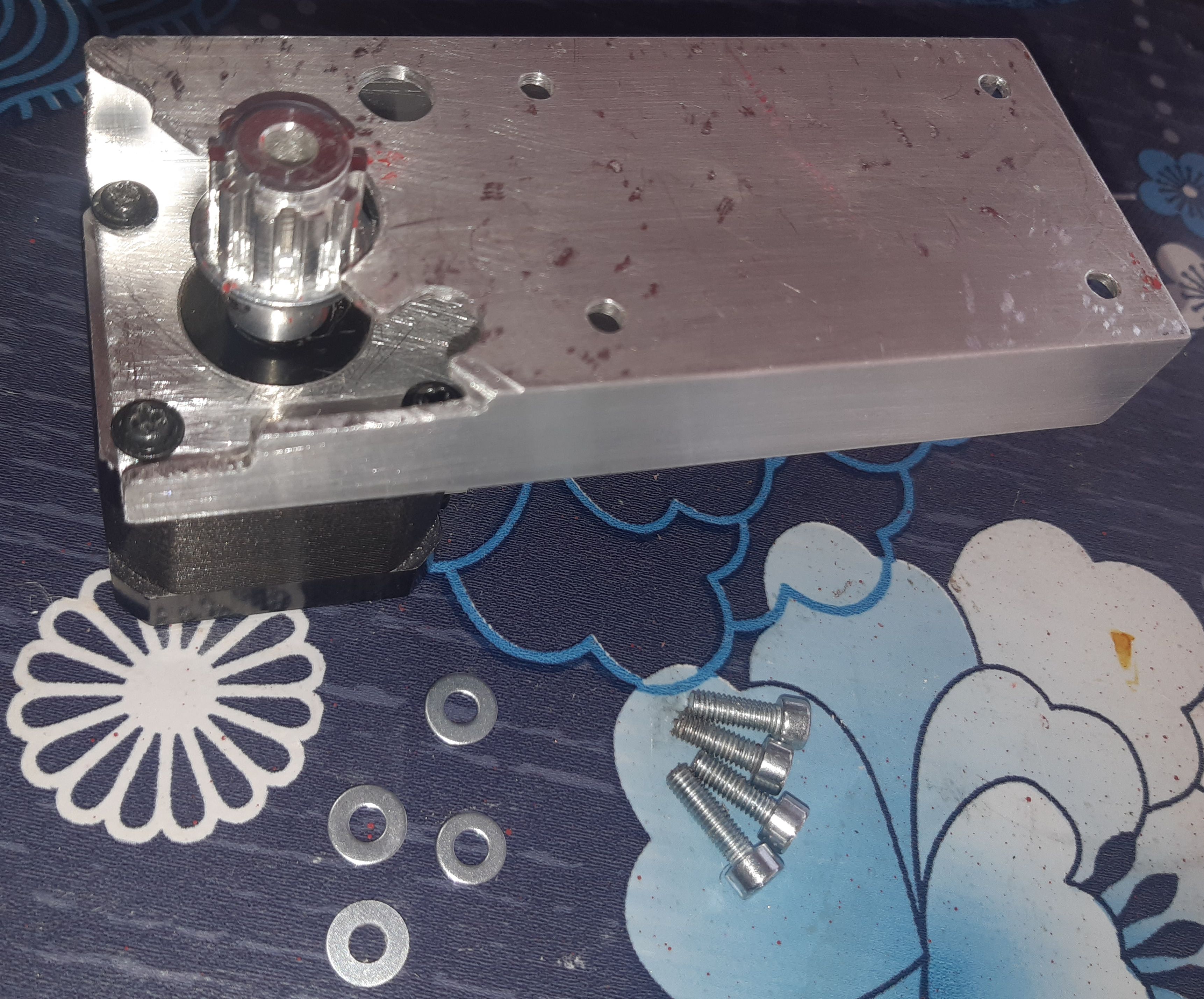
Avec cette solution et avec un pignon aux
dents larges, il n'y a même pas besoin de modifier le pignon. Si on pose
le télescope sur son support comme d'habitude.
Attention : cette solution ne fonctionne que si le couple à entrainer
reste faible: télescope bien équilibré et remplacement probable des
patins en Teflon par des roulements à billes.
Si on ne veut pas connecter
le moteur,
on peut se servir du télescope, comme d'habitude, entièrement en manuel ou
avec seulement le Ez
Push to...
Avec le moteur déconnecté et le pignon, l'effort à faire pour pousser le
télescope est à peine plus élevé (équivalent de 300g au lieu de 200g,
mesuré au dynamomètre au niveau de l'oculaire) qu'avec le patin Téflon
d'origine et ne pose pas de problème.
Nota : pour un gros télescope,
on pourrait installer, carrément, 4 moteurs pas à pas (avec, chacun,
une résistance suffisamment élevée), 4 pignons et 2 courroies crantées,
tout ça à la place des 4 patins.
Les premiers essais électriques (avec un contrôleur à 2 balles) :
.
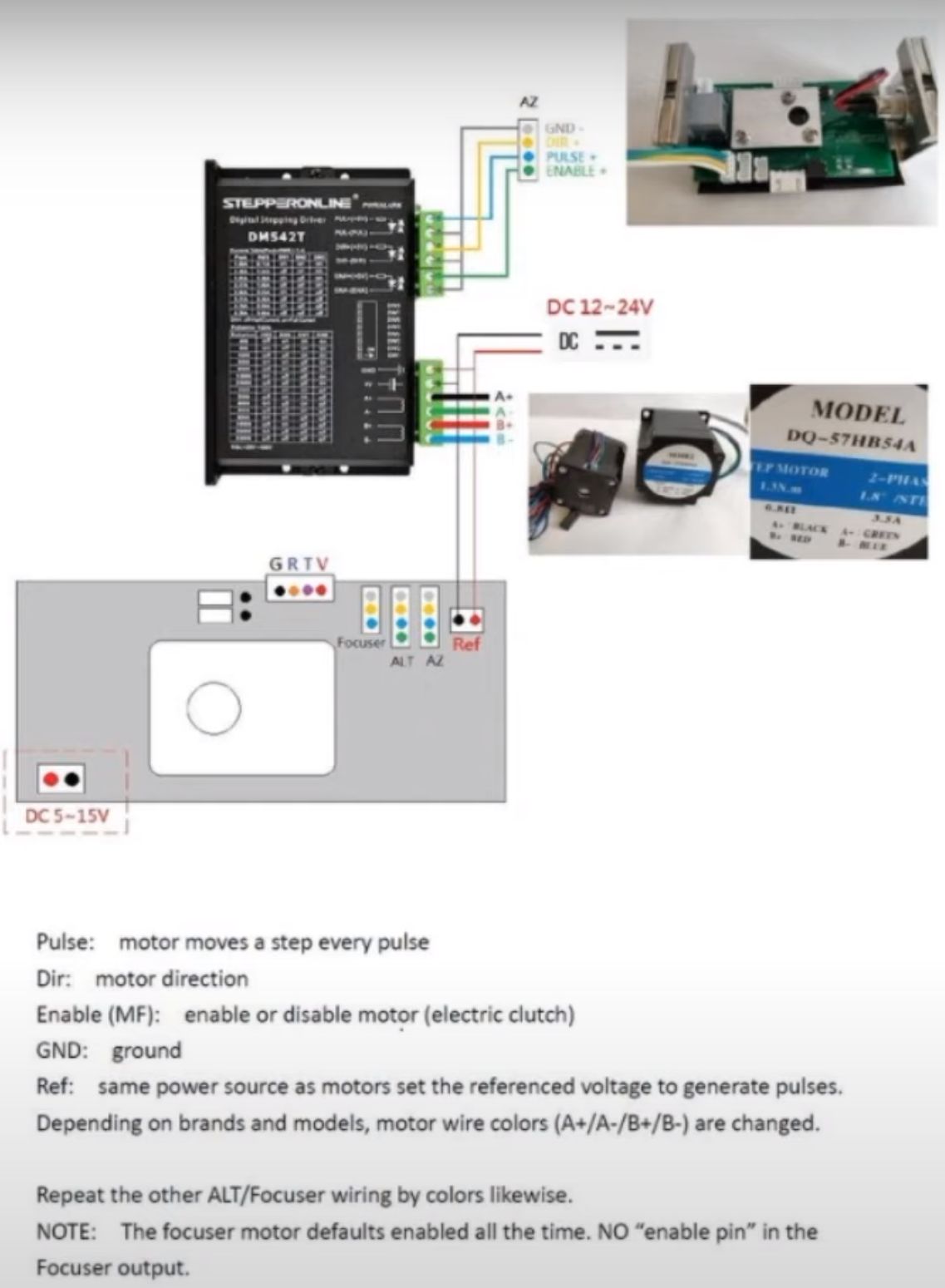
Nous avons commandé 2 contrôleurs 256 micropas DM542 (environ 15 € pièce) (on peut aussi utiliser un DM556 un peu plus puissant).
Ces modèles, (environ 16 € pièce) nécessitent 24V de tension d'alimentation minimum.
- Gnd et Vcc doivent être reliés à l'alimentation (24V par exemple), ET au
connecteur EXT-PWR 2 broches à côté du RJ45 du module d’Azimut du kit
Ez Push to
- A+ A- B+ B- connectés, comme sur la photo précédente (si le connecteur
du moteur a 6 broches, on n'en utilise que 4) au connecteur du moteur
pas à pas
- Les broches ENA- DIR- et PUL- doivent être connectées à la masse
- Les broches ENA+ DIR+ et PU+ doivent être connectées aux broches
correspondantes du connecteur
- La Led PWR verte s'allume sous tension
- La Led ALARM (rouge) s'allume en cas de
problème (débrayage, surchauffe contrôleur...)
Nota
: les contrôleurs, nécessitent 20V mini de tension d'alimentation : si
on dispose de 12V il faut un convertisseur. (On trouve environ 10€ des
convertisseurs DC step up 12V->24V 10A)
Nota : si Enable n'est pas activé,
le contrôleur "ouvre" le moteur qui ne consomme plus rien et ne maintient
plus rien non plus
Nota
: pour régler les courants de maintien, laisser les moteurs sous tension pendant 10 mn
: ils doivent être tièdes ou chauds mais pas brûlants :-)
Nota
: si un moteur pas à pas tourne à l'envers, il faut inverser
les 2 fils d'une seule bobine (n'importe laquelle)
Nota : un moteur pas à pas,
c'est presque indestructible....
Nota : un kit
Ez Goto va forcément consommer
beaucoup plus qu'un simple Ez Push to...
Nota
: il vaut sans doute mieux commencer par l'Altitude qui risque d'être le
mouvement le plus difficile à réaliser. Une fois ces problèmes résolus théoriquement et
pratiquement, il n'y a "plus
qu'à" monter les contrôleurs et câbler les moteurs, acheter le kit
Ez Goto Romer, installer l'application gratuite et faire les essais...
Et, comme d'habitude, il faut mieux résoudre les problèmes dans l'ordre :
mécaniques, puis électriques, puis informatiques...
Nota
: à notre avis, pour les "petits" télescopes (moins de 300) équilibrés, des moteurs
pas à pas très puissants ne sont pas nécessaires. De toute façon,
dans les contrôleurs,
il y a un réglage de réglage de courant max : un compromis entre puissance
et maintien versus échauffement du moteur
et consommation.... Si les moteurs sont trop chauds et qu'on ne peut
pas diminuer leur courant, ça veut dire qu'ils sont trop petits...
Nota
: étant donné que la carte fournit un signal "enable" aux moteurs Azimut et
Altitude; il doit être possible de les débrayer via l'application, par
Soft, pour un "Push to" Manuel... (ou même de couper les 2 signaux
"enable" des contrôleurs avec un interrupteur...)
Eric Romer doit m'envoyer d'autres photos du kit...
Motorisation
Azimut :
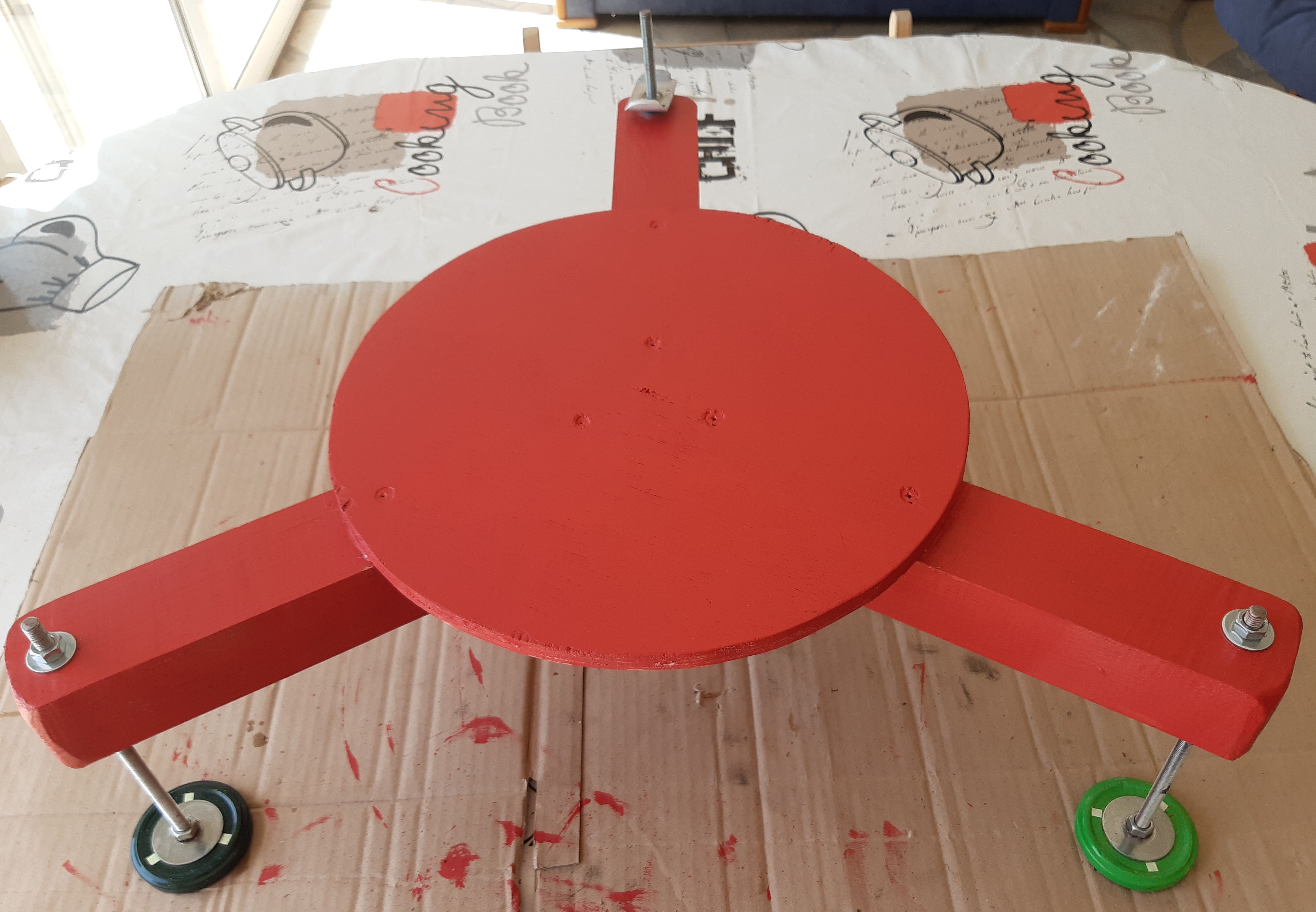
Nous avons construit un nouveau support à
3 pieds réglables en hauteur pour tester le mouvement des Azimut du Ez
Goto :

.
Un disque circulaire Ø330 de CTP 10 sur lequel sont vissés collés 3 pieds
en bois (des ex pieds de table), chacun muni d'un pied réglable en hauteur
:
Nous allons fixer un niveau à bulles 2 axes sur le support.
.
La courroie crantée 430XL025
de 1092 mm de long s'enroule autour du disque en CTP. Le disque est muni
de l'axe (avec un roulement à billes et un aimant cylindrique) fourni par
Romer.
Un disque sandwich alu est posé dessus
pour assurer la surface de glissement des patins Téflon du Rocker (et
retenir la courroie).
Sur la photo : la courroie qui s'enroule
autour du disque de CTP de 10, le disque sandwich, le moteur et sa poulie
(posés là provisoirement)
L'axe (fourni par Romer) est installé. Le
petit filetage du haut reçoit l'aimant cylindrique du capteur.
En arrière-plan, le rocker avec le moteur
d'altitude et le support d'un roulement à billes.

.
Le rocker du télescope (avec ses 3 patins
Téflon) est posé dessus.
Un trou dans le rocker laissera passer la
poulie crantée du moteur Nema17 relié au rocker.
L'axe du Kit dépasse avec son aimant
cylindrique (il doit dépasser pour affleurer le circuit intégré capteur du
module sans le toucher.
Des plaques en acier maintiennent le
module (muni d'aimants)
 .
.
.
Tout est en place, sauf la découpe pour le
moteur dans le fond du rocker et la fixation du moteur.
(Nous attendons la courroie définitive avant de percer le trou).
Le connecteur d'alimentation sera installé sur le côté du rocker.
Au montage, il faudra juste brancher le
connecteur du moteur pas à pas du mouvement d'Altitude (à gauche sur la
photo) et dont le câble va dans le rocker à travers un trou visible et brancher l'alimentation 24V.
Et il faudra poser le capteur du mouvement
d'Altitude (monté sur la photo) qui est maintenu par des aimants et
brancher son câble RJ45 gris dont le câble va aussi dans le rocker.
Il faut 2 ou 3 s pour monter et brancher le moteur et le capteur
d'Altitude...

.
Il nous manque la courroie, les contrôleurs, les connecteurs (tout ça est
commandé).
Et le kit Ez Goto (lui n'est pas commandé, nous allons faire des essais
électriques auparavant...)
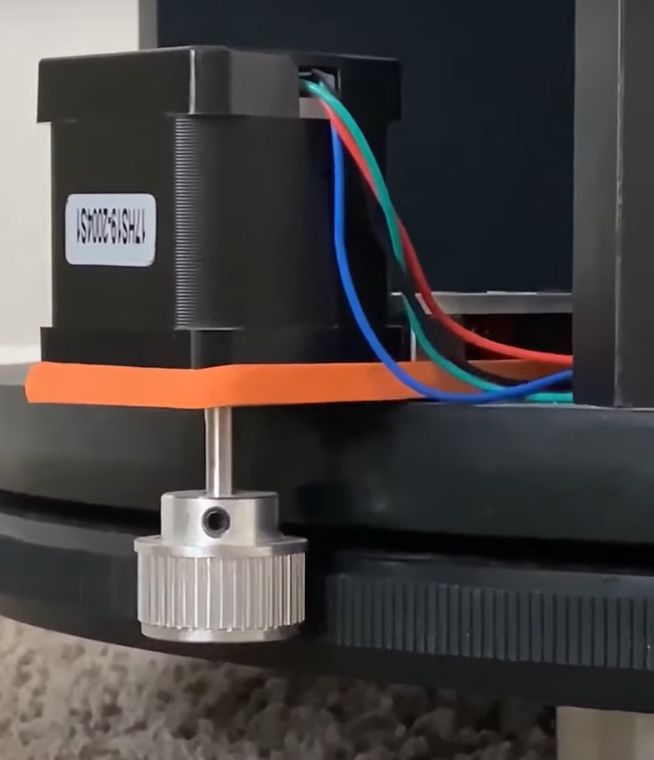
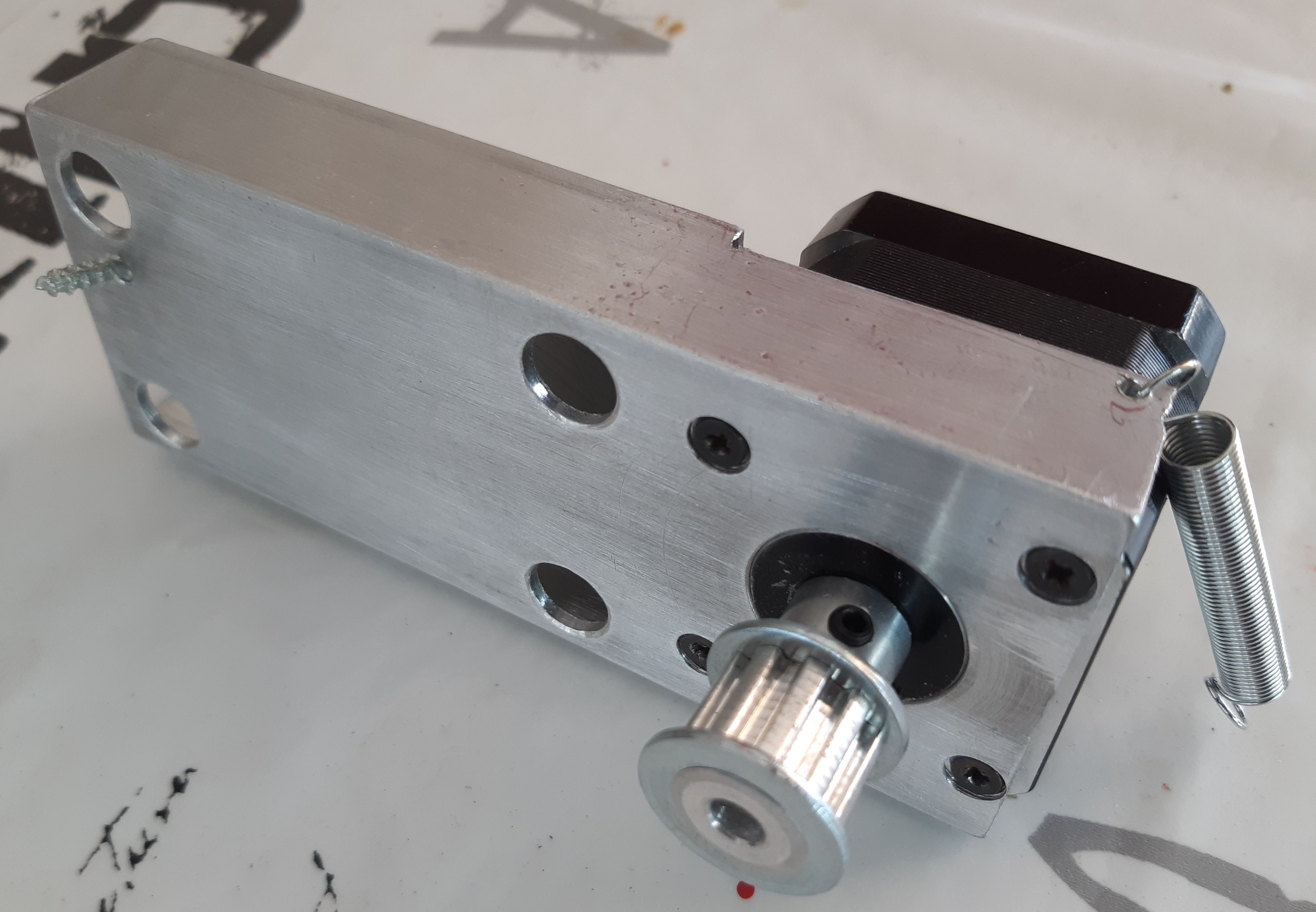
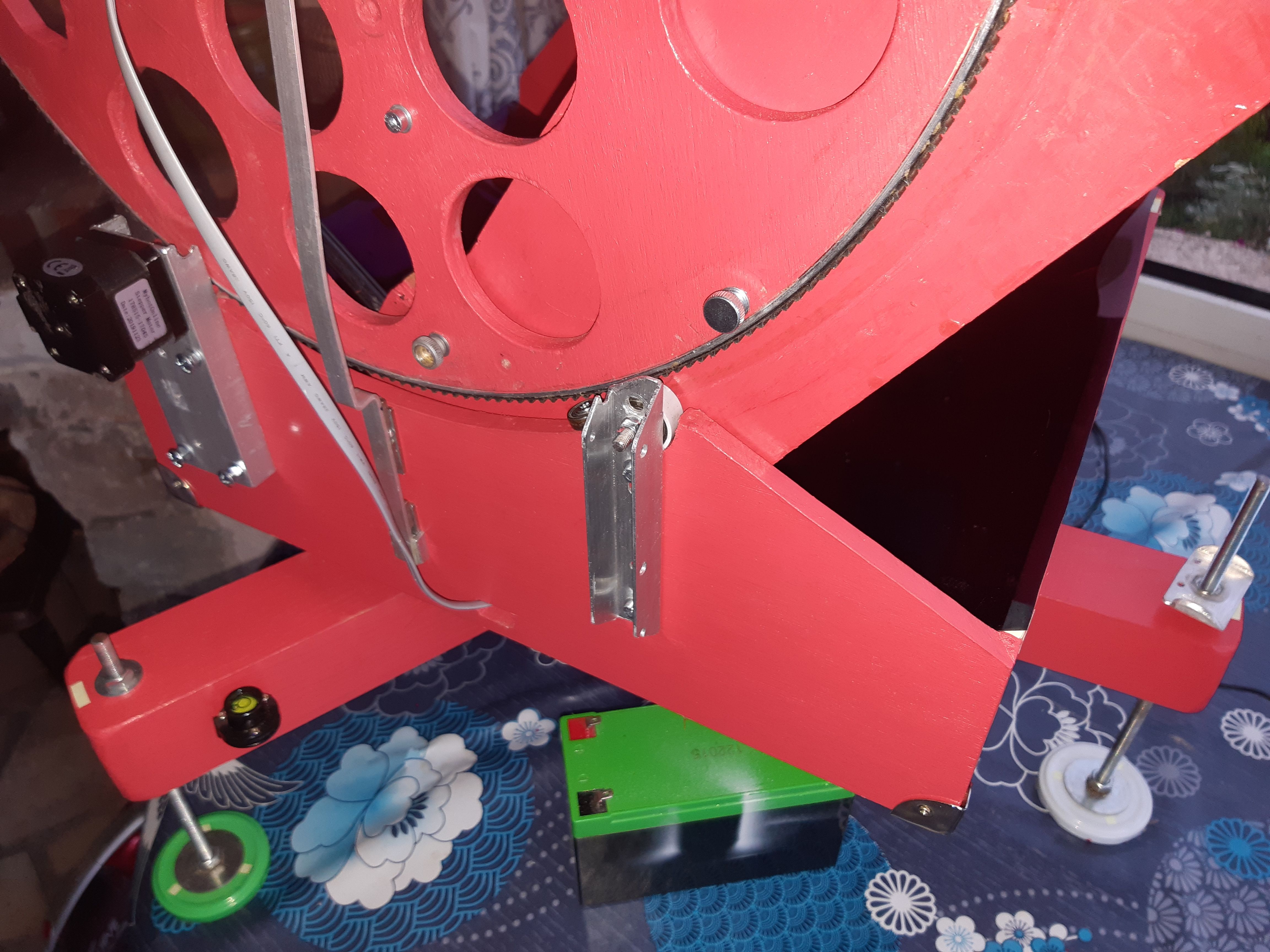
Montage du moteur d'Azimut : il est
fixé, par 4 vis fraisés M3 "enterrées" sur un morceau de profilé aluminium
qui "frotte" sur la base du rocker, percée d'un trou pour laisser passer
la poulie. Ce profilé est fixé, avec du jeu, par une vis M4 (rondelle,
écrou, contre écrou) qui sert d'axe de rotation sur la base du rocker. Le
profilé aluminium pivote autour de cette vis (remplacée par une vis à bois
sur la photo). Le ressort de traction attaché au profilé sera relié à une
autre vis M4, fixée sur la base du rocker, et qui assure la tension de la
courroie.
.
La base percée d'un trou pour laisser passer la poulie. Le moteur en
place avec la courroie, à droite la vis M4 et le trou pour laisser
passer la clef (écrou, contre écrou). A gauche, le ressort de traction
qui, en faisant pivoter le profilé, le moteur et sa poulie, maintient
la courroie en tension.
.
Moteur déconnecté, le mouvement, entraîné à la main, reste très doux :
l'axe de l'Azimut, comme l'axe Altitude, restent parfaitement utilisables,
à la main, sans batterie ou avec seulement le Push To.
Il n'est même pas nécessaire de décrocher le ressort si on
n'utilise pas le moteur...
.
La courroie vue de dessous. La tête de la vis M4 de l'axe est visible. La
courroie s'enroule sur le disque de CTP 10. Le disque en sandwich alu (qui
reçoit les patins Téflon).
Tout à gauche, un morceau du compas à bulles réglable 2 axes.

.
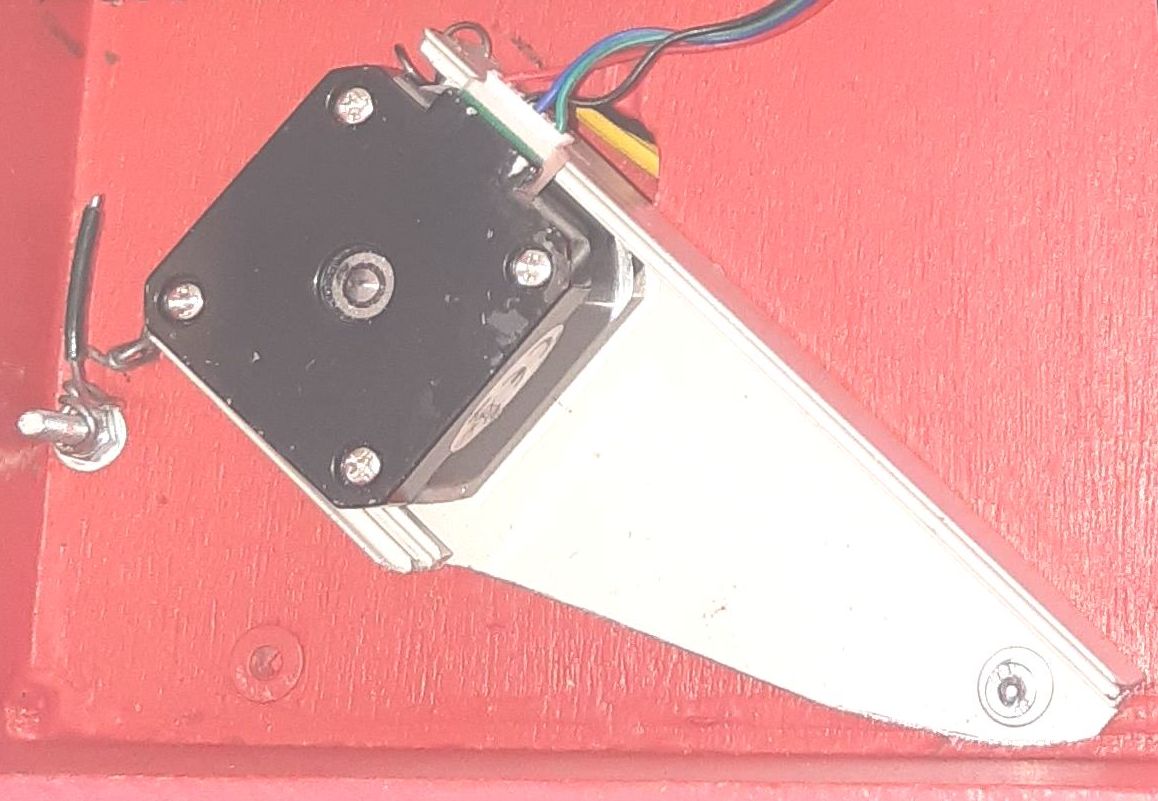
Le système monté en entier : Sur le rocker, sous le télescope est installé
une feuille de plastique semi rigide qui protège l'électronique, les
moteurs, les contrôleurs, le capteur de la poussière et de
l'humidité.
A gauche, le moteur d'Altitude et le niveau à bulle 2 axes réglable. On
voit le support en aluminium du capteur d'Altitude et le support du
roulement à billes d'Altitude. Pour éviter un contact directement acier du
roulement sur aluminium de la hache, chaque roulement est entouré d'un
petit morceau de PVC (tube électrique) gris. Sur le pied de droite, un
écrou M8 serti dans un morceau de tôle pour pouvoir serrer le contre écrou
du pied sans clef.
Reste à faire des essais électriques sur l'axe Azimut. Ça ne devrait pas
poser de problème.
Nous avons
commandé le Ez
Goto Upgrade de Romer
: la carte Azimut, l'aimant, la tôle de centrage, les câbles et
connecteurs (pour 85$ plus frais de port).
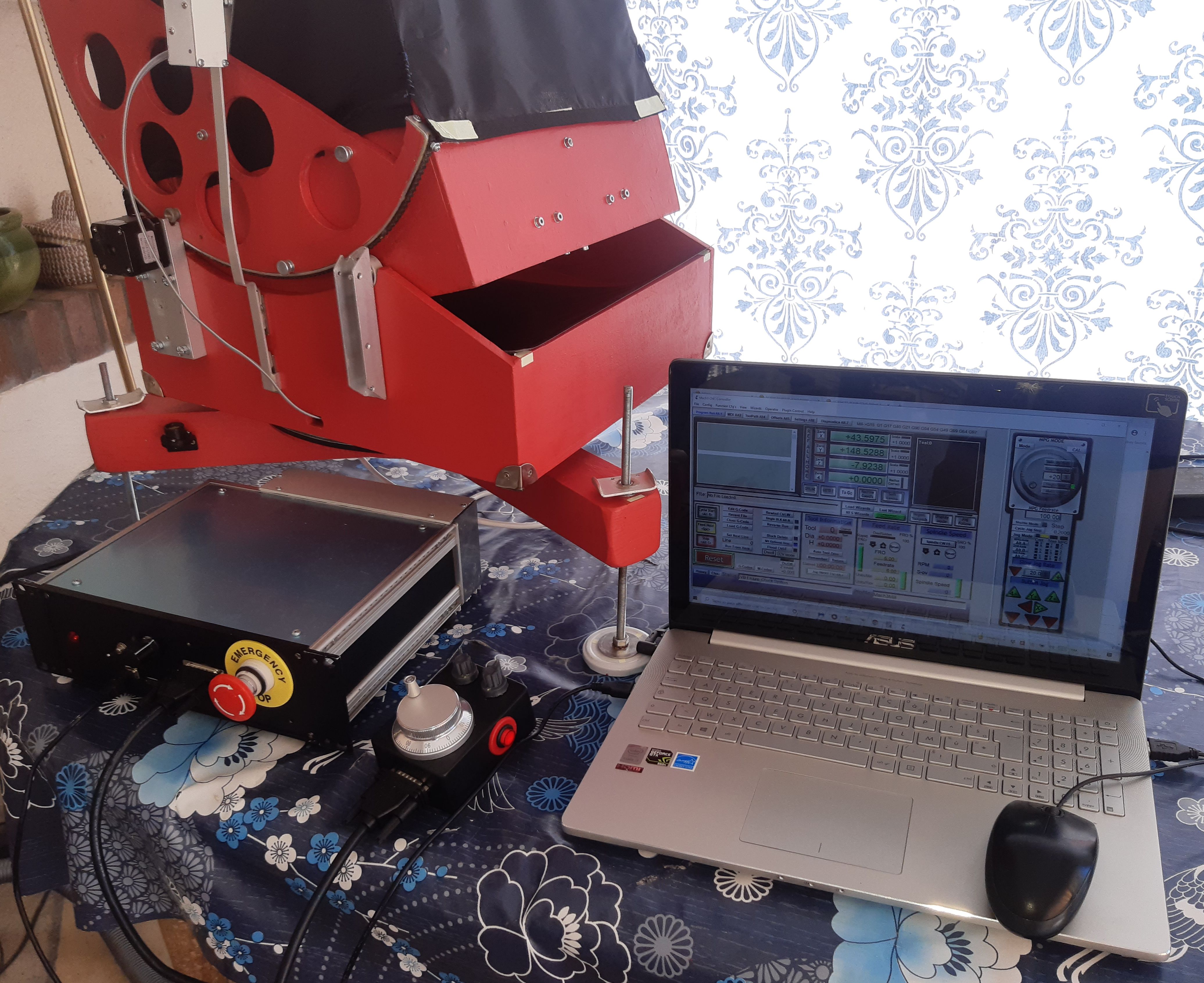
En attendant, nous avons connecté le moteur d'Azimut sur la sortie Moteur
X de l'électronique de commande de notre CNC 4 axes
(munie de contrôleurs TB6600 32 micropas max) reliée au logiciel Mach 3.
Un logiciel de CNC
pour piloter un télescope !
Nous avons considérablement ralenti la vitesse maxi des moteurs dans Mach3
(ne pas se faire assommer par un télescope :-)
Sur la photo, seul le moteur d'Azimut est connecté pour l'instant. Ça
marche bien mais il faut retendre un peu le ressort du moteur...
.
Une courte vidéo de la rotation
motorisée (Azimut) du télescope. Attention, cette vidéo a été réalisée avec des contrôleurs 32 micropas qui génèrent du bruit et des vibrations au tracking.
Nous avons ensuite connecté aussi le
moteur d'Altitude sur la sortie Moteur Y de la CNC.
Ainsi, nous pouvons tester, le fonctionnement, le bruit, les vitesses,
les accélérations, les glissements ou les patinages éventuels...
Une courte vidéo de la rotation
motorisée en Azimut ET en Altitude du télescope Attention, cette vidéo a été réalisée avec des contrôleurs 32 micropas qui génèrent du bruit et des vibrations au tracking
Une vidéo de 15s de la rotation motorisée du télescope Attention, cette vidéo a été réalisée avec des contrôleurs 32 micropas qui génèrent du bruit et des vibrations au tracking
Nous avons tous les éléments, Il ne nous manque plus que le Ez
Goto Upgrade de Romer
(et l'application Ez Goto Android) pour brancher tout ça et faire les essais...)
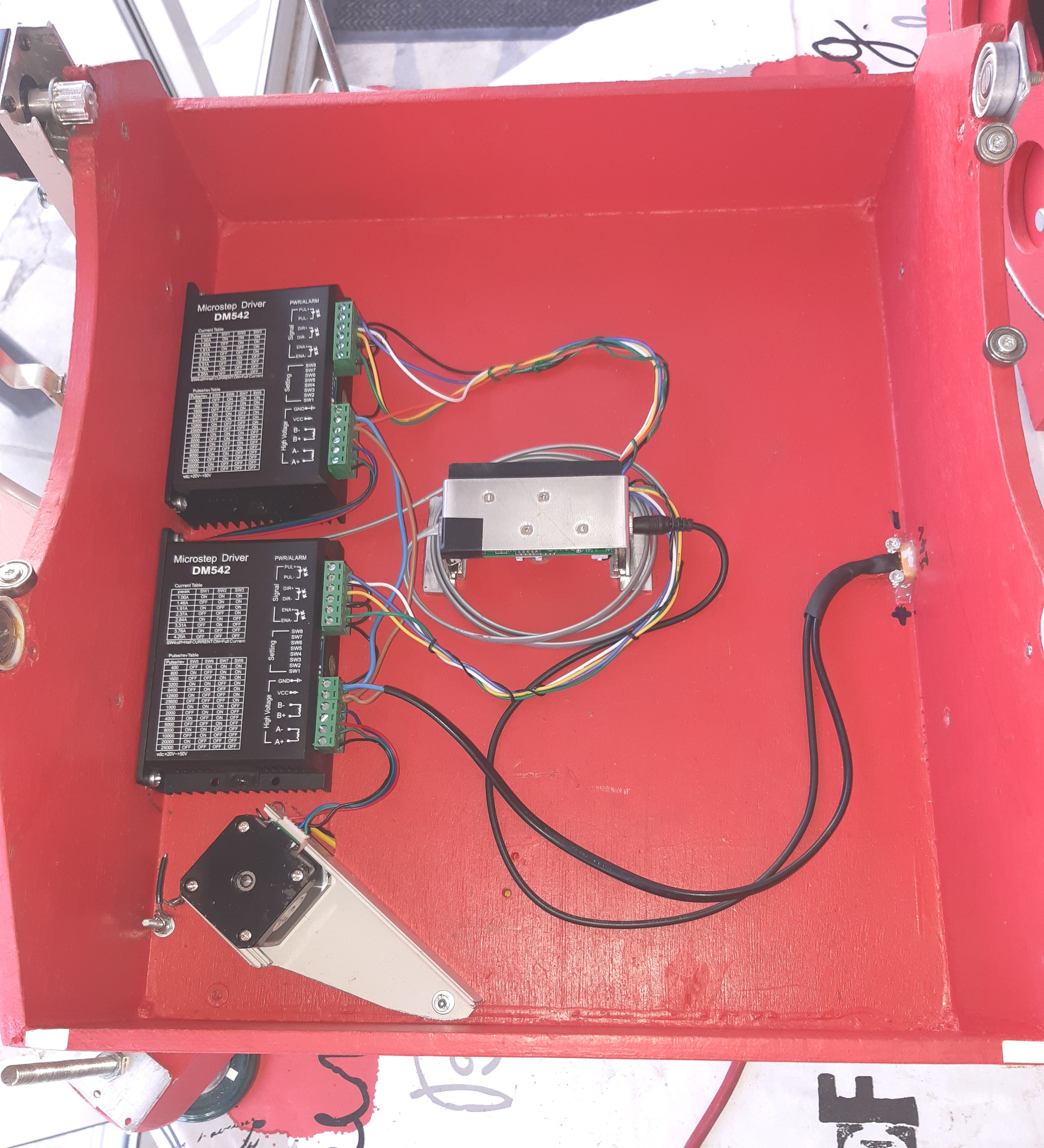
.
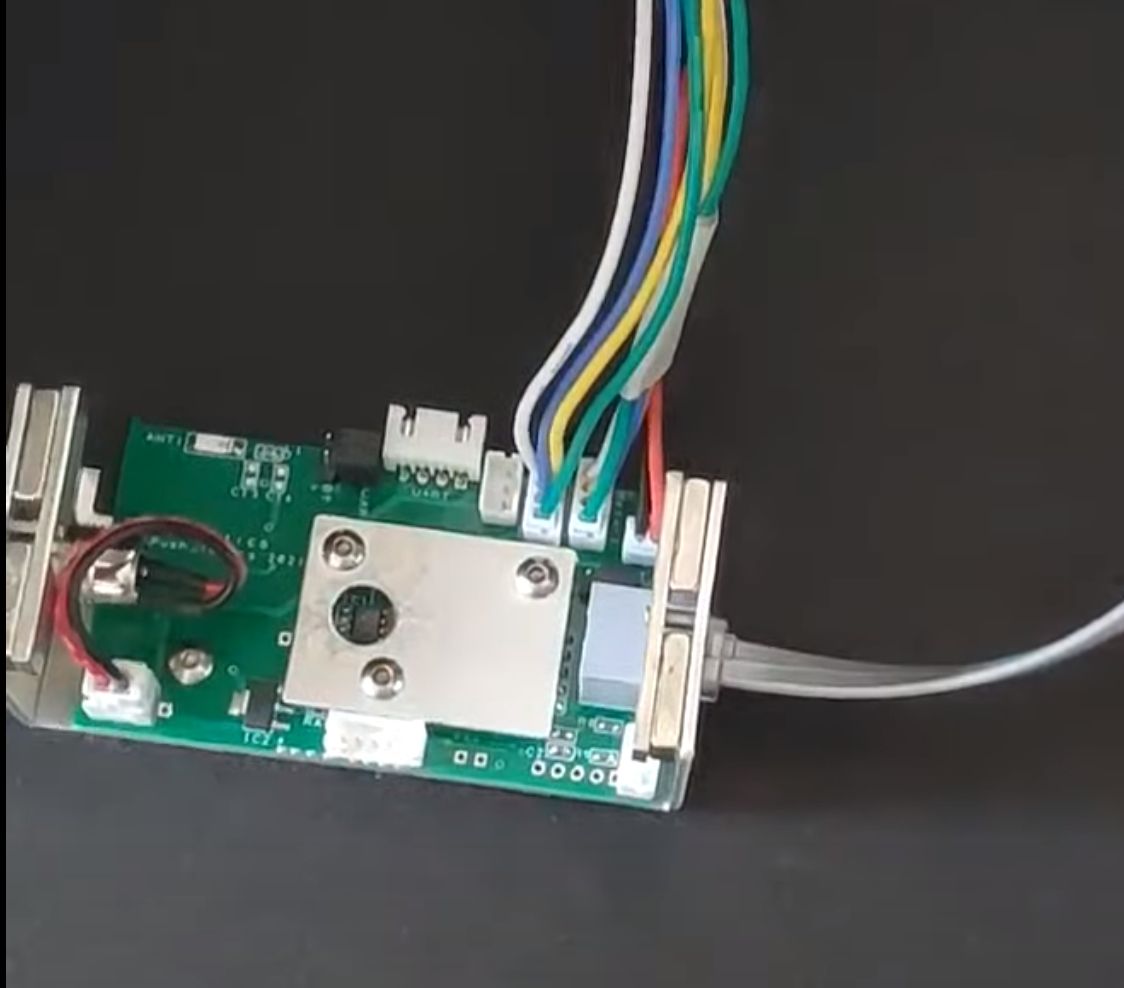
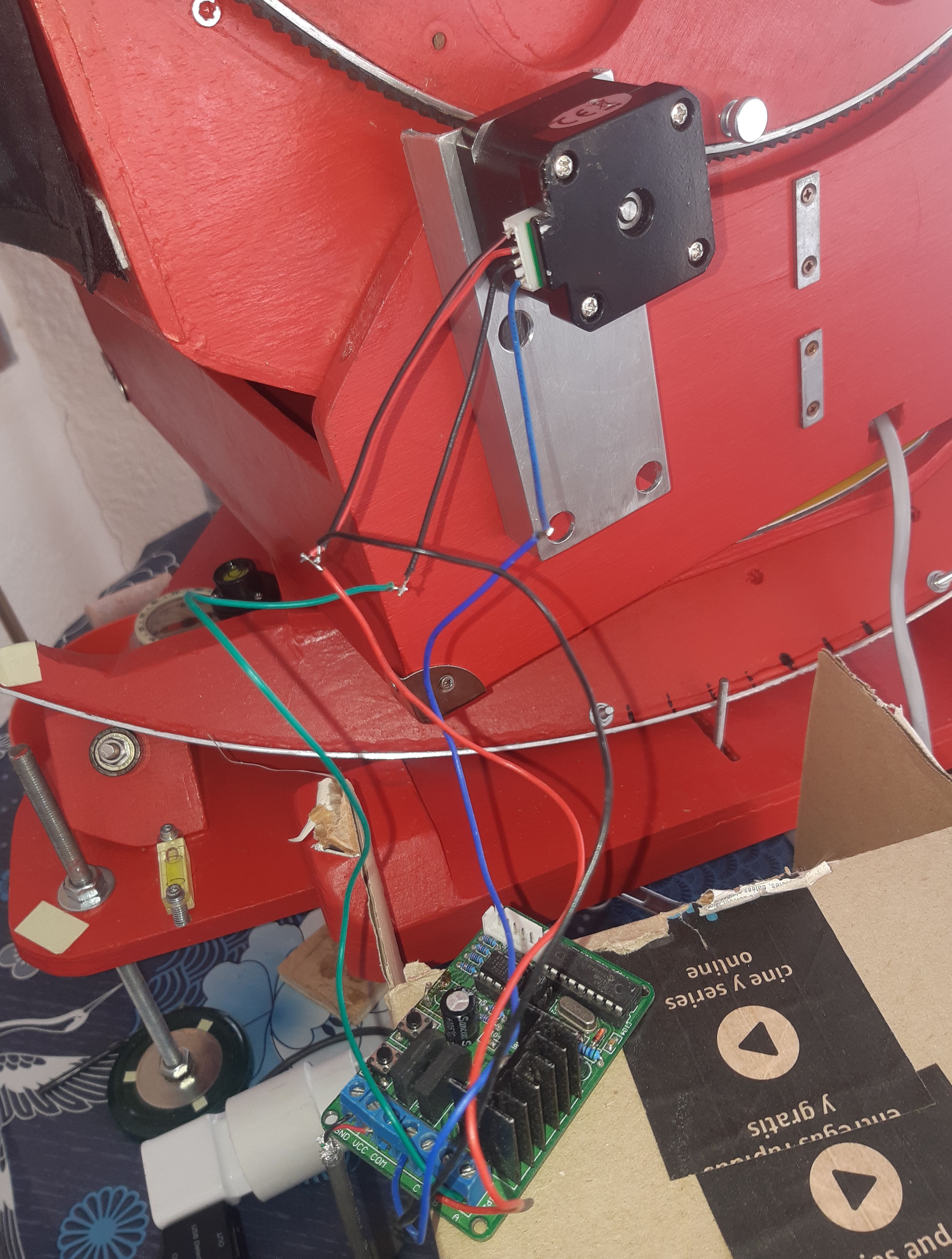
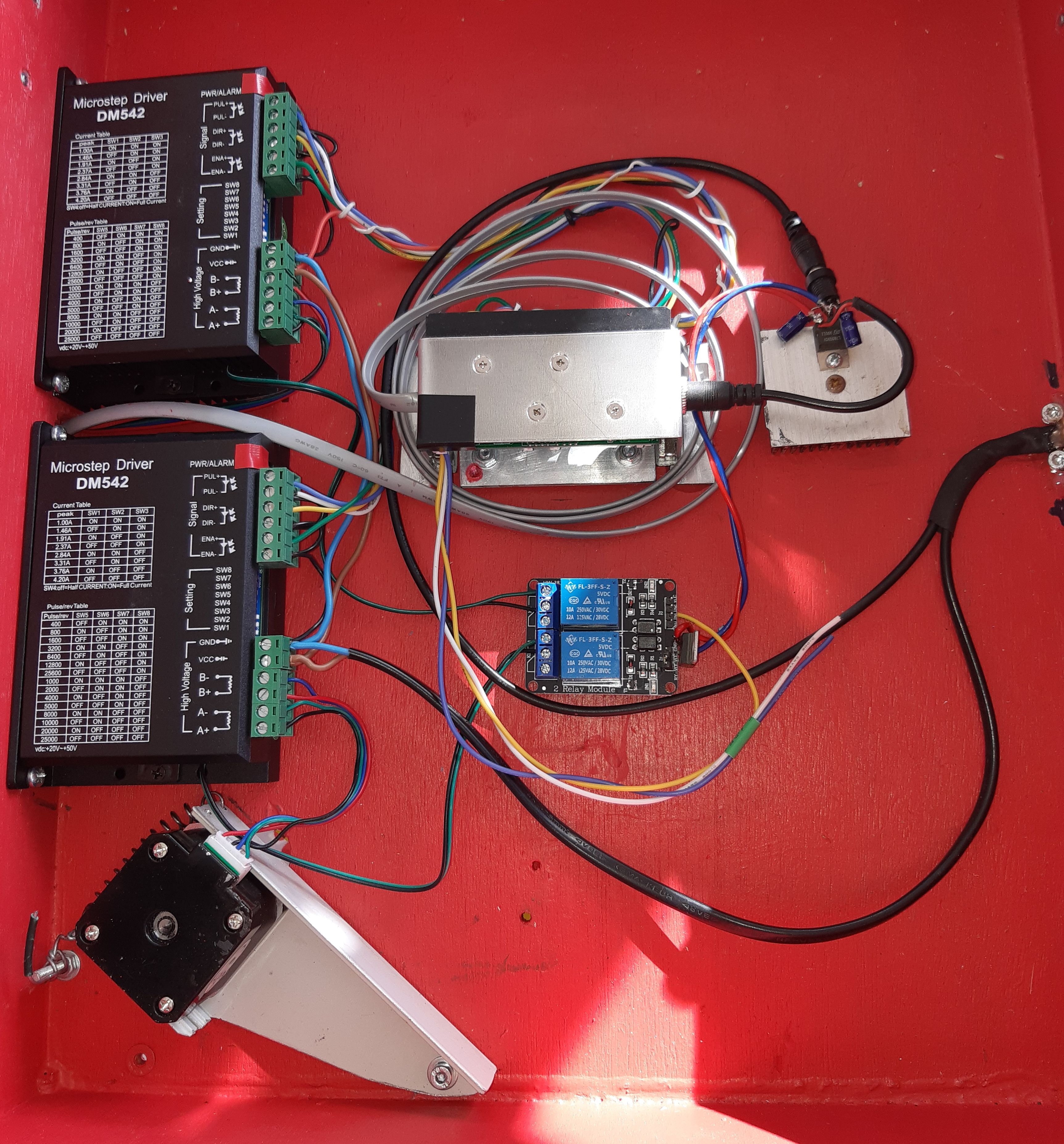
Le télescope en cours de câblage :
Les 2 contrôleurs DM542, un morceau de moteur d'azimut et le module principal du Goto...

.
Nous alimentons le télescope en 24 V à cause des contrôleurs.
Plus tard, nous ajouterons un convertisseur 12 V -> 24 V (6 A minimum) pour pouvoir l'alimenter en 12 V (batterie, voiture...)
ATTENTION : la tension
d'alimentation maxi du module Romer Ezgoto est de 15 V. Si nous
alimentons le module en 24 V, le régulateur de tension du module chauffe
(il est protégé thermiquement) mais au bout de quelques minutes, il
disjoncte et on perd le Bluetooth. Nous avons donc rajouté un petit
régulateur qui lui envoie du 12 V. Lorsque nous alimenterons le
télescope en 12 V (avec un convertisseur DC DC step Up 12 V -> 24 V)
il faudra veiller à alimenter le module en 12 V.
Nota : Eric Romer recommande une machine Android avec un score Antutu d'au moins 150 000 pour faire tourner l'application Ezgoto Android.
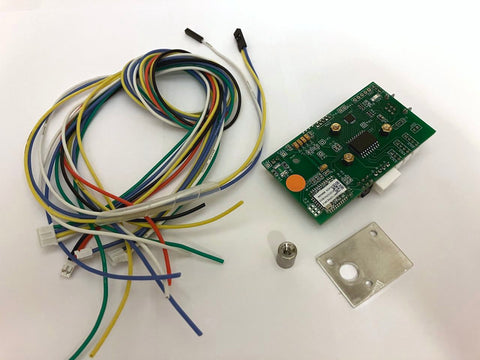
Le kit Ez Goto Upgrade est arrivé :
- Le module Ezgoto lui-même (avec le "boîtier" en tôle.
- 2 connecteurs et fils 4 broches à relier aux contrôleurs des moteurs Azimut et Altitude
- Blanc=gnd
- Jaune=pulse
- Bleu=dir
- Vert=enable,
- Connecteur 2 broches alimentation relier à l'alimentation des contrôleurs (reliés à la batterie de leur côté)
- Connecteur 3 broches pour le focuser (dont je n'ai, pour l'instant, pas besoin)
- Blanc=gnd
- Jaune=pulse
- Bleu=dir
- Une
petite carte interface USB <-> série et ses câbles et connecteurs
pour piloter via un PC avec un logiciel comme Stellarium. A priori
c'est un cadeau Romer
- Des accessoires, vis et un aimant cylindrique (dont je n'ai pas besoin sauf si je perds un aimant)
- Une petite carte à trous à souder ???
- Un
petit module avec des fils à souder : un module régulateur à découpage
pour fournir au choix selon soudure au verso de la carte : 12 V, 9 V, 5 V,
3.3 V, 2.5 V, 1.8 V (0.5 A ?)
.

.
Le télescope câblé : de gauche à droite
Le moteur d'altitude
Le support du capteur angulaire d'altitude
Les deux contrôleurs 256 micropas
Le moteur d'azimut monté sur sa platine avec un axe et un ressort
Le module Ezgoto
Le connecteur 24V du télescope
.
Essais :
Il faut d'abord régler les switches
des contrôleurs : je propose de commencer par un courant maxi faible et
le plus grand nombre de micropas :
- Courant pointe 1.00A :
- Half current
- Pulse : 25000
- SW5 OFF
- SW6 OFF
- SW7 OFF
- SW8 OFF
La liaison Bluetooth fonctionne...
- Il faut alimenter les
contrôleurs (256 micropas 24 V) de moteur (ET
relier aussi l'alimentation au connecteur "EXT_PWR" 2 broches blanc de la
carte EZ GOTO.)
- Attention : (corrigé sur la photo ci-dessus)
- DIR+ relié au fil jaune
- PUL+ relié au fil bleu
- ENA+ relié au fil vert
- (Les - à la masse)
- Le ressort de tension de l'azimut a été retendu...
- Permutation d'une phase du moteur Azimut pour inverser la rotation (même sens que l'application)
Nota :
sur mon télescope, il est nécessaire de masquer à l'adhésif noir la Led
rouge clignotante du module Az pour ne pas perturber l'observation.
Les moteurs tournent, le télescope
bouge assez lentement : environ 1 °/s. Pas de vibrations au tracking,
les moteurs font un bruit faible qui ressemble à celui d'un ventilateur.
Moteur ALT :
Moteur AZ :
Utilisation de EZ GOTO (Android) :
Malheureusement, il manque une vraie documentation pour l'application Android EZGOTO (réclamée à Eric Romer...)
Il faut d'abord connecter le télescope en Bluetooth. Puis
aligner le télescope : par exemple en pointant l'étoile polaire. Puis
le télescope va se déplacer amplement sur les deux axes pour calculer,
pour chaque axe, le ratio entre le pas des moteurs et l'angle de
déplacement mesuré par le capteur magnétique correspondant.
Vocabulaire :
- Alt : Altitude (axe horizontal)
- Az : Azimut (axe vertical)
- Backward : marche arrière des moteurs Az Alt ou Focuser
- DEC : déclinaison de l'objet à observer en °
- Encoder : capteur magnétique Alt ou Az
- Focuser : pour actionner le moteur électrique de mise au point (option inutilisée ici)
- Forward : marche avant des moteurs Az Alt ou Focuser
- Gear ratio : rapport entre le nombre de pas moteur et l'angle des capteurs (que l'application détermine automatiquement M1 Gear Ratio... Voir plus bas)
- Micro motion : petits déplacements moteur Alt ou Az
- Micro steps : micro pas des moteurs (plus lent, plus précis)
- Microswitch : les leviers blancs de réglage des contrôleurs S1 S2 S3 S4 S5 S6 : bas : On, haut : OFF (intensités et vitesse)
- Night light : éclairage nocturne
- Offset : écart Alt ou Az entre la position du télescope et la réalité, mise en station du télescope
- PEC : correction d'erreur périodique
- Pulse : impulsion électrique pour les moteurs pas à pas Alt et Az ou Focuser
- RA : Ascension droite : position de l'objet à observer en h mn s
- Settings : réglages
- Sidereal : suivi du mouvement du ciel
- SPP Bluetooth : Serial Port Profile : connection Bluetooth
- Target : cible : objet à observer ou sa position
Réglages du téléphone ou de la tablette Android :
- Il faut régler la mise en
veille du téléphone ou de la tablette sur une durée très grande ou
infinie (si on peut) sinon on perd la liaison Bluetooth sur mon
téléphone Samsung Galaxy Xcover 4s...)
- Il faut penser à NE PAS ETEINDRE manuellement l'écran du téléphone pour les mêmes raisons
Nota :
après avoir réglé les intensités des moteurs et les avoir fait
fonctionner au moins 10 minutes, il faut les toucher : ils doivent être
tièdes : pas bouillants :-)
Nota : un moteur pas à pas, c'est quasi indestructible !
Nota :
sur mon télescope, il est nécessaire de masquer à l'adhésif noir la Led
verte de chaque contrôleur pour ne pas perturber l'observation.
Mise en route (sans l'option Dual Speeds) :

- Positionner le
télescope sur une surface stable et régler la hauteur des pieds d'après
le niveau à bulle 2 axes pour une base parfaitement horizontale (Axe Az
parfaitement vertical)
- Pointer approximativement le télescope vers l'étoile polaire
- Mettre le télescope sous tension 24 V (Au début, je recommande un ampèremètre 2 à 5 A max en série sur l'alimentation)
- Lancer l'application Android EZ GOTO (il faut un appareil Android suffisamment rapide)
- Clic sur BLUETOOTH OFF, choisir Romer Optics : l'application affiche BLUETOOTH ON (sinon problème de connexion Bluetooth)
- Clic sur GPS ON / NEXT
- RESTORE clic sur NO
- Clic sur ENCODERS ALT : RIGHT
- Clic sur YES
- Clic sur LEFT SIDE : sur mon télescope, le capteur angulaire ALT est monté à gauche (Je recommande de le monter à droite pour éviter cette étape)
- Clic sur OFFSET / NEXT PAGE
- Clic sur OFFSET
- Clic sur CONTINUE
- Pointer manuellement soigneusement l'étoile polaire (centrée à l'oculaire) (les moteurs sont débrayés)
- Clic sur POLARIS (pointage sur l'étoile polaire) (les moteurs sont embrayés)
- Le télescope est (à peu près) aligné !
- Clic sur OFFSET / NEXT PAGE
- Clic sur NEXT : le menu multicolore apparaît
- Clic sur engrenage gris, en haut, à droite
- Clic sur M1 GEAR RATIO :
le télescope se déplace vers le bas tout en pivotant pour calculer le ratio entre les pas
des moteurs et les angles des capteurs
- Il doit afficher (par exemple)
- M1 Angle = 2.64° G.R = 27.96203 (par exemple) (Az)
- M2 Angle = 2.55° G.R = 28.92624 (par exemple) (Alt)
- S'il n'affiche pas une valeur pour M1 et M2, il faut recommencer : clic sur M1 GEAR RATIO...sinon problème d'aimants ou de capteurs
- Nota : on est obligé de le refaire chaque fois qu'on lance EZGOTO qui ne mémorise malheureusement pas les valeurs
- Clic sur BACK en haut à gauche pour retourner dans le menu
Utilisation (sans l'option Dual Speeds) :
- Dans le menu, clic sur SPP Stellarium
- Clic sur l'engrenage pour débrayer les moteurs
- On peut pointer manuellement très approximativement le télescope vers la zone à observer
- Clic sur l'engrenage pour embrayer les moteurs
Nota : Les moteurs restent embrayés ou débrayés quand on va dans les autres menus
- Clic sur BACK (Menu)
- Nota : si l'objet est éloigné de la zone pointée :
- Clic sur SPP STELLARIUM
- Clic sur Engrenage gris pour débrayer les moteurs
- Pousser manuellement le télescope à peu près dans la zone souhaitée ex proche de M81
- Clic sur Engrenage gris pour embrayer les moteurs (on entend un petit "clac")
- Clic sur BACK (Menu)
- Clic sur Deep Sky Overlook
- Clic sur Messier 45
- Taper 81, OK, pour remplacer Messier 45 par Messier 81 (par exemple. Ce peut être aussi un NGC ou une étoile de la liste ou des coordonnées RA/DEC...)
- Clic long sur Messier 81
- GOTO M81, Confirm to GOTO, clic sur GOTO
: l'application affiche la carte du ciel et le télescope s'oriente et
progressivement pointe la galaxie M81 et passe en mode tracking pour la
suivre...
- Clic à gauche, droite, au-dessus ou en dessous de la cible pour affiner le pointage à l'oculaire si besoin
- Clic long sur le nom de l'objet en haut en bleu
- Clic sur OFFSET : l'application
affiche (par exemple) M81 has been offset, Zone 1 & 5 (la mire
s'est recentrée sur l'objet et la précision du pointage vient d'être
améliorée)
Nota : On a intérêt de faire un offset chaque fois qu'on pointe un objet dans une zone éloignée des précédentes...
- On peut aussi, Menu, Solar system
- Clic par exemple sur Jupiter
- Clic sur GOTO : le télescope se dirige vers Jupiter puis passe en mode tracking pour suivre
NOTA : dans le mode Starry Roaming avec la carte du ciel ET en mode tracking :
- Clic à gauche de la mire centrale déplace le télescope à gauche
- Clic à droite de la mire centrale déplace le télescope à droite
- Clic en haut de la mire centrale déplace le télescope vers le haut
- Clic en bas de la mire centrale déplace le télescope vers le bas
- Clic sur la mire centrale, télescope en marche, arrête le télescope qui démarre en tracking
- Clic sur la mire centrale, télescope à l'arrêt, arrête le tracking, un autre clic le redémarre
- CLIC LONG sur le nom de l'objet en cours de tracking puis clic sur OFFSET permet de recadrer l'objet et d'affiner le pointage
Ouf !
A ce moment-là, Ez GOTO passe
en mode tracking (on entend le bruit faible de "ventilateur" des moteurs pas à
pas), suit l'objet et affiche en Hz (Hertz) les fréquences de
tracking Az et Alt.
Ces fréquences sont constantes pendant 1 minute (selon le réglage de
SPP STELLARIUM), au bout d'une minute, elles sont remises à jour...
Le menu SPP STELLARIUM permet d'ajuster ces fréquences si besoin : voir ci-après.
NOTA : si à ce moment-là, on
perd la connexion avec la tablette ou le téléphone, le tracking est
maintenu mais les fréquences ne sont (évidemment) plus remises à jour.
NOTA
: en tracking, avec ces réglages, la consommation varie entre 0.3 et 0.6
A. La consommation moyenne, sous 24 V doit être autour de 0.5 A (Avec les switches des contrôleurs réglés sur 1.00 A).
- Menu, S P P STELLARIUM
- Clic
sur Engrenages gris : embrayent ou non les 2 moteurs pas à pas
(malheureusement pas d'indication visuelle de l'état de l'embrayage à part l'ampèremètre)
- Les 4 grosses flèches rouge fond blanc (Micromotion) déplacent le télescope, le Rond rouge central l'arrête
- L'engrenage 3/4 rouge annule le réglage
- Les 4 petites flèches rouges fond blanc, en bas, permettent de retoucher finement les fréquences de tracking ALT et AZ
- La cible jaune ???
- Le télescope vert ???
- Dans la page S P P STELLARIUM, clic, haut droite, SETTINGS, SETTINGS
- Frame rate low
- Average 1 min in Tracking (temps de recalcul des fréquences de tracking)
- SIDEREAL (Suit la rotation du ciel, LUNAR pour la Lune...)
- MICROMOTION 50 X (Augmenter le chiffre diminue la vitesse de déplacement)
Nota
: pendant l'utilisation, il ne faut pas trop écarter (5 ou 6 m) le
téléphone ou la tablette du télescope pour ne pas perdre la liaison
Bluetooth.
Nota : la fonction RESTORE
récupère le pointage du télescope (si on a perdu la connexion et que la
base du télescope n'a pas bougé). Mais elle ne récupère malheureusement
pas les Gear Ratio des moteurs qui assurent un pointage correct et qu'il faut refaire.
Nota : la fonction RESTORE permet aussi d'éviter de refaire le pointage précis du télescope sur les étoiles s'il n'a pas bougé.
Avantages et inconvénients du kit EZ GOTO Upgrade :
+ Prix compétitif
+ Bon support client
+ En cas de perte de contact avec Android, le tracking continue en mode dégradé (vecteur linéaire)
- Documentation quasi inexistante (hardware et software) (quelques vidéos sur Facebook)
- Nécessite pas mal de bricolage et de mise au point
- Application EZ GOTO pas très ergonomique et très perfectible (Eric Romer a promis une nouvelle version...)
-
Un peu lent (mais Eric Romer propose une solution "Dual Speeds") et
l'application permet de débrayer les moteurs, pour pousser à la main
dans la zone à observer
Suggestions pour le kit EZ GOTO Upgrade :
- Notice d'installation hardware
- Notice d'installation software
- Notice d'utilisation software
- Déplacements accélérés pour plus de précision
- Rappel visuel embrayage moteur
- PWM pour diminuer les vibrations et le bruit suivi moteurs
- Clic sur la carte l'objet à pointer et à suivre
Bon, ça y est, ça marche : on suit Saturne, Jupiter, M57, M13 (pour commencer) !
En cas de problèmes :
Le kit Ez Goto de Romer est bien et pas très cher mais il manque une vraie notice pour l'installation.
-
Sur chaque contrôleur, il ne faut pas oublier la connexion
entre la masse alimentation : GND et les masses commande : ENA- DIR-
PUL-.
- Les contrôleurs 256 micropas ont une tension nominale de 24 V, ils ne fonctionnent plus en dessous de 20 V.
- Un kit
Ez Goto va forcément consommer
beaucoup plus qu'un simple Ez Push to... Jusqu'à 3, 4 ou 5 A en pointe...
- Au début, un ampèremètre (à aiguille) 5 ou 10 A monté en série avec la batterie ou l'alimentation peut être utile...
- Le connecteur 2b (gnd +), blanc Ref à côté du RJ 45 est à relier sur l'alimentation des contrôleurs
de moteur. (Qui doivent être alimentés de leur côté)
- Le kit Ezgoto accepte une tension d'alimentation mini de 5 V mais les contrôleurs nécessitent 20 V mini.
- Mais attention, la tension maxi du kit est de 15 V
-
En principe, les moteurs pas à pas ont une bobine entre le
noir et le vert, une autre entre le rouge et le bleu : (on peut le
vérifier à l’ohmmètre : quelques ohms entre noir et vert, quelques ohms
entre rouge et bleu et l’infini entre les autres combinaisons). Il faut
relier le noir vert au B- B+ dans n’importe quel ordre, le rouge et le
bleu au A- A+ dans n’importe quel ordre OU il faut relier le noir vert
au A- A+ dans n’importe quel ordre, le rouge et le bleu au B- B+ dans
n’importe quel ordre. Si un moteur tourne à l’envers, il faut permuter
le noir vert OU le rouge bleu.
- Attention au câblage des contrôleurs :
- DIR+ relié au fil jaune
- PUL+ relié au fil bleu
- ENA+ relié au fil vert
- (Les - à la masse)
- Si l'application marche on peut lancer plusieurs fois de suite : Menu, Engrenage gris haut droite, M1 GEAR RATIO
pour voir si on obtient des valeurs stables : sinon glissement, aimants
qui se dévissent, perte de pas ou problème de courroie...
- Sur les contrôleurs, je suggère de régler les switches pour un
courant maxi assez faible et augmenter ensuite si besoin : si les
moteurs "glissent". Perso je cherche le courant limite pour lequel le moteur ne patine pas et je
règle 1 cran au-dessus. (1 A pour Az et Alt sur mon télescope)
-
Il faut bien s’assurer que les aimants ne tournent pas par rapport à la tige
filetée sur laquelle ils sont montés. Perso, je les freine avec du mastic silicone et je fais un repère au feutre
sur la tige et l’aimant pour contrôler. Il faut aussi que les aimants ne soient pas à plus de 2 ou 3 mm du capteur
(le bidule noir au fond du trou des modules)
-
Normalement, dès la mise sous tension, sans téléphone ni application
:
- La Led verte de chaque contrôleur est allumée, la Led rouge est éteinte
- La Led rouge du module Ezgoto azimut clignote
- La Led rouge du module Ezgoto altitude clignote
- Les 2 moteurs sont “bloqués”
- Le courant consommé (selon les réglages de contrôleurs) peut varier en
0.2 et quelques Ampères.
- Au bout de 10 minutes, les moteurs doivent être tièdes mais pas
bouillants (on peut laisser la main dessus)
- Si les moteurs offrent la même résistance que débranchés, on peut mettre
un voltmètre entre ENA- et ENA+, dès la mise sous tension, il devrait y avoir environ 0.65 V
- Pour éviter les glissements de courroie sur l'axe Az (télescope
lourd), il faut choisir une courroie et un pignon avec un module
suffisamment grand : des grosses dents.
Une vidéo de 3mn (pas toujours très lisible) : Attention, cette vidéo a été réalisée avec des contrôleurs 32 micropas qui génèrent du bruit et des vibrations au tracking.
Alimentation, connexion Bluetooth,
capteur côté gauche, offset sur la polaire, essais de déplacement Az et
Alt, détermination des ratios pas moteurs/angle, sélection M81,
pointage et suivi M81.
Et deux nouvelles vidéos de Eric Romer (La première est un peu comme la mienne, en mieux. Si je l'avais eu plus tôt j'aurais gagné du temps...)
Video EZ GOTO APP DEMO
Video EZ GOTO Software Part II
Une 2e vidéo de 5mn Attention, cette vidéo a été réalisée avec des contrôleurs 32 micropas qui génèrent du bruit et des vibrations au tracking.
Alimentation, connexion Bluetooth,
capteur côté gauche, offset sur la polaire, détermination des ratios pas moteurs/angle, essais de déplacement Az et
Alt, débrayage, embrayage, sélection M81,
pointage et suivi M81, retouche position et tracking.
Une astuce
: une difficulté,
sur mon Strock 250, vu le poids de la partie mobile du télescope (une
dizaine de kg) et malgré l'emploi de 3 patins en Teflon sur une plaque
composite alu/epoxy (jaune) avec un bon glissement pour l'axe Az, le
couple,
pour faire tourner le télescope, n'est malgré tout, pas négligeable. A
la main, ce n'est pas un gros problème. Pour le moteur ça peut poser
problème et nécessiter un courant élevé, de bien tendre la courroie :
ce qui oblige à régler le
ressort de tension du support moteur d'axe Az à une tension élevée, ce
qui a tendance à faire marcher la poulie en biais... : ce n'est pas
l'idéal.
Avec un télescope de plus de 10 kg, le couple de rotation autour de l'axe Az peut facilement être trop élevé :
- Courant moteur élevé, consommation, échauffement moteur
- Courroie très tendue
- Courroie qui patine sur le pignon moteur ou la couronne...
- "Collage" des patins au démarrage...
- Moins de confort en usage manuel "PushTo" moteurs déconnectés
Télescope
horizontal, si on mesure le couple pour le faire tourner au niveau de
l'axe Az : couple mesuré au dynamomètre au niveau de l'oculaire, à mon
avis, il ne faut pas dépasser autour de 1 N (l'équivalent de 100 g). Ce
qui peut être difficile à atteindre pour des télescopes de plus de 10
kg avec des patins Teflon.
Pour résoudre de problème, on peut remplacer les patins Teflon par des
roulements à billes (attention à veiller à ce que les roulements ne
creusent pas la surface sur laquelle ils roulent.)
Je propose une 2e solution : l'installation d'un gros ressort à boudin
de compression sur l'axe Az et qui doit être réglé pour absorber au
moins les 3/4 de la masse du télescope et alléger d'autant les patins
Teflon et le couple correspondant.
J'ai donc disposé un gros ressort à boudin
(en fait, un ressort récupéré sur une pompe et recoupé à la disqueuse) entre la base et le rocker.
Une fois le télescope monté, ce ressort pousse l'équivalent d'environ 8
kg ce qui fait ça de moins sur les patins et ce qui rend le mouvement
de rotation plus doux et avec un couple beaucoup plus faible. (Et
permet de moins tendre le ressort de moteur)
(Ce "gros ressort", étant très proche de l'axe, et malgré les 8 kg,
induit un couple très faible). Il faut juste s'assurer que sa poussée
reste inférieure à la masse de la partie mobile, à tester sur une balance de ménage...

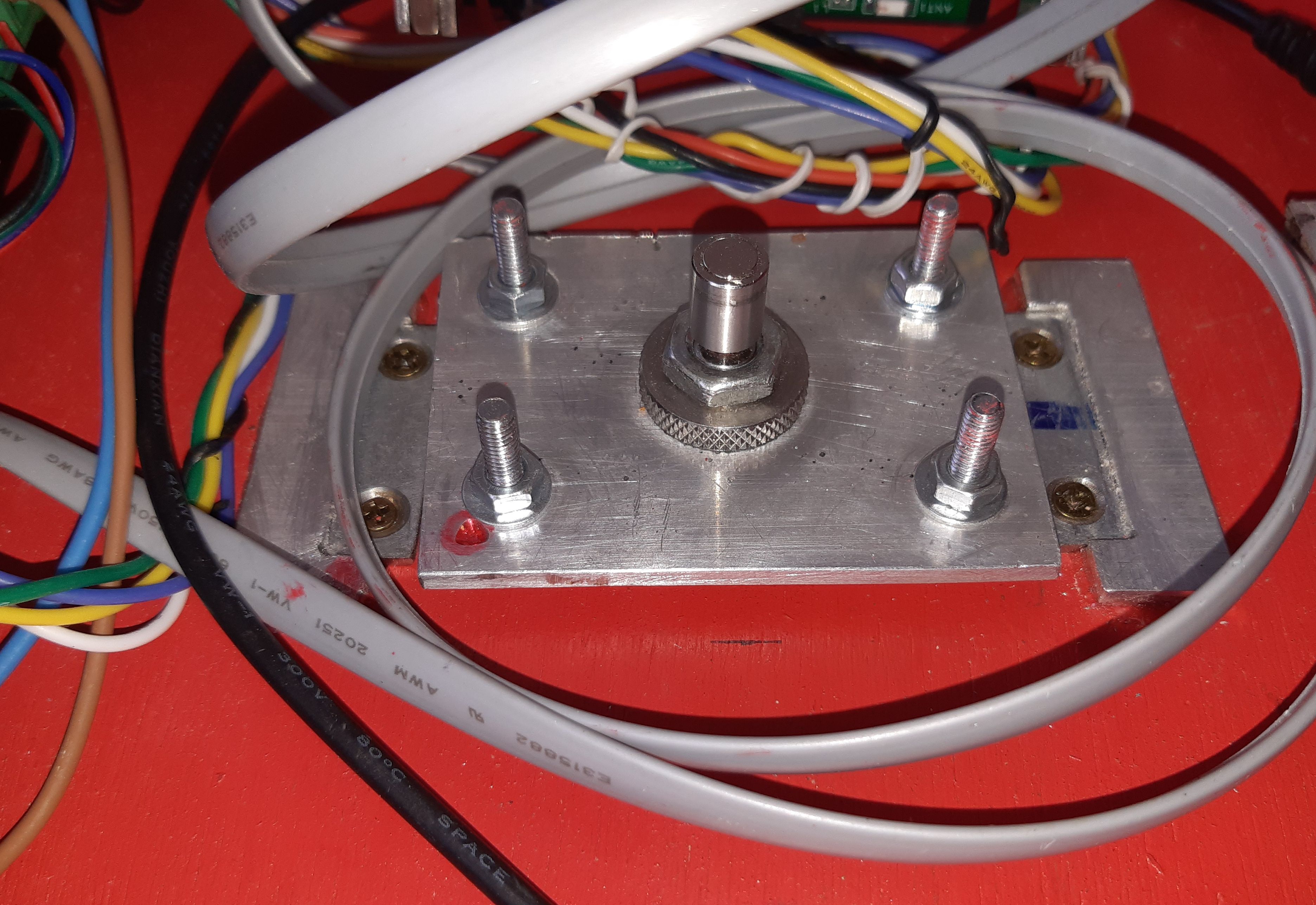
.
Pour
laisser passer le ressort, j'ai agrandi le trou (Ø24) dans le rocker et
fixé
(4 vis M4x30) une plaque en tôle d'aluminium (70x50) (sur le rocker
côté module, pour chaque vis, il y a un écrou et 3 rondelles entre la
plaque et le rocker) muni d'un trou Ø7.5 pour laisser
passer l'axe. En réglant (en ajoutant ou supprimant des rondelles) la
position de la tôle, on peut régler précisément la pression du ressort
et donc de combien on allège les patins...(Les vis passent
de justesse sous le module EzGoto, depuis, je les ai remplacées par des vis plus courtes...).
.
Sur mon télescope, avec le ressort, je suis passé d'un couple d'environ
3 N (300 g) (mesuré au niveau de l'oculaire) à environ 0.6 N (60 g).
Nota
: Le ressort ne déplace rien : les objets sont exactement à la même
position que sans le ressort. Il se contente de pousser le rocker pour
alléger son appui sur les patins Teflon et donc le couple de rotation.
Nota :
une fois de plus, il faut bien s'assurer d'avoir résolu les problèmes
mécaniques avant de s'attaquer à l'électronique et l'informatique...
Une vidéo de 7 mn avec les micropas de 256
(Le bidule bleu, posé sur la
table, à côté de l'alimentation, c'est le dynamomètre qui me sert à
mesurer le couple et l'équilibrage)
Eric Romer propose une nouvelle (25/10/2022) doc :
https://cdn.shopify.com/s/files/1/1023/8189/files/EZ_GOTO_LITE_KIT.pdf?v=1666636270
https://youtu.be/4RE8-DOUO14
Test de la fonction "Dual Speeds" proposée par Eric
:
J'ai chargé la nouvelle application gratuite EzGoto Dual Speeds. Je l'ai installée et testée : je récupère bien le signal
sur le connecteur 3 broches du module (broche centrale).
J'ai câblé un relais pour modifier dynamiquement le nombre de
micropas des contrôleurs. (Le relais ferme un des switches de chaque
microcontrôleur pour diminuer le nombre de pas et augmenter la vitesse,
quand on est proche de l'objet, le relais tombe et on récupère la
précision)
Rappelons que ce système optionnel permet de déplacer le télescope plus
rapidement. A mon avis, pour ceux qui ont des moteurs sans réducteurs
(comme moi) l'intérêt est discutable puisque on peut désactiver les
moteurs et pousser le télescope à la main. Pour ceux qui ont des
moteurs avec réducteur, ça peut être intéressant.
La manip est assez simple et économique (mais bon, ça fait encore un machin en plus..)
Voir la doc à partir de la page 8 : https://cdn.shopify.com/s/files/1/1023/8189/files/EZ_GOTO_LITE_KIT.pdf?v=1666636270
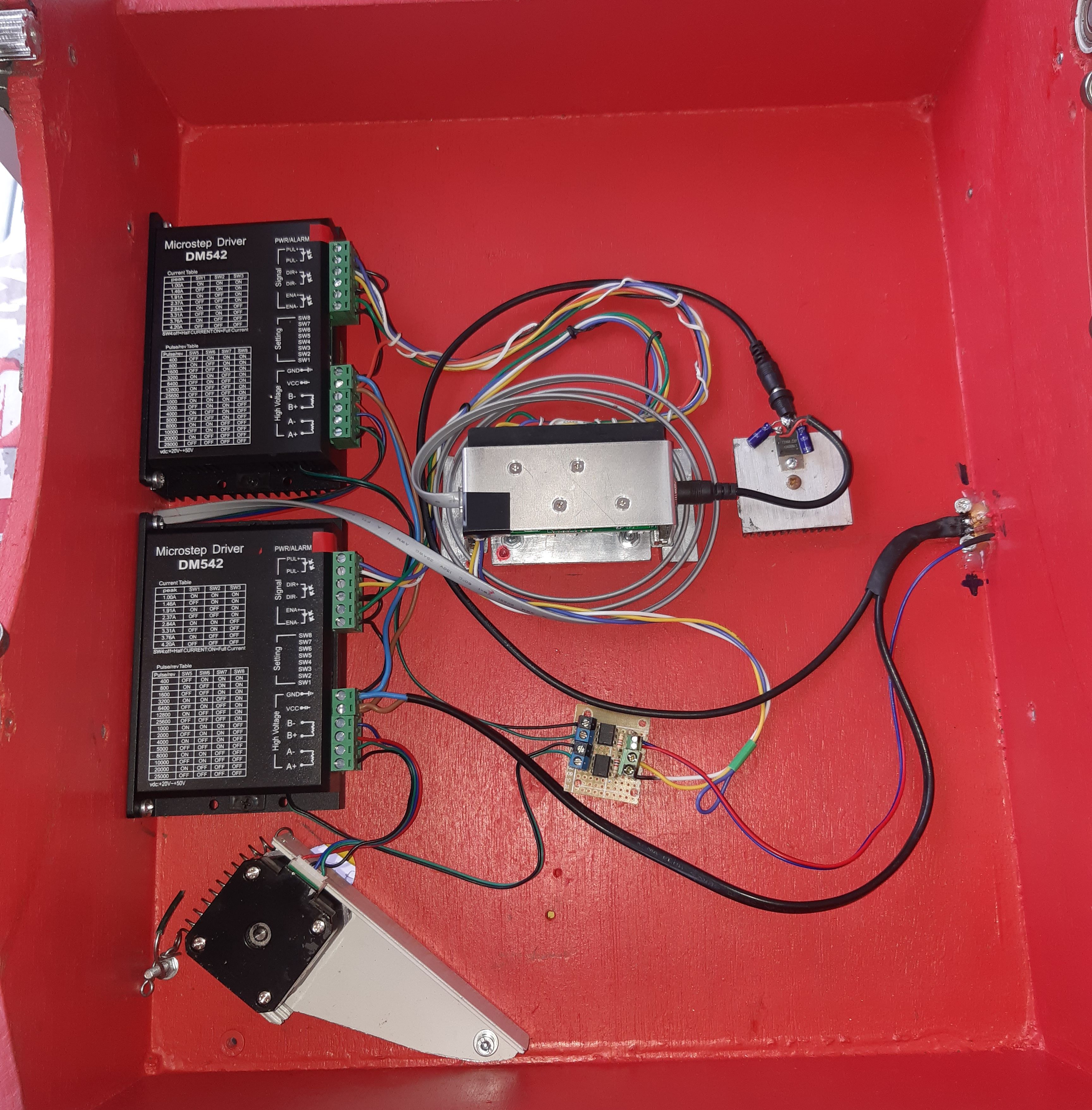
Photo du câblage "Dual Speeds" :
- De chaque contrôleur part, en bas, un
câble 2 fils (noir/vert), soudé sur le microswitch SW6 du contrôleur
(un peu délicat à faire sur les DM542)
- Ces câbles sont reliés chacun aux contacts de sortie d'un relais (bleu)
- Le module relais (qu'il faudra
protéger) est alimenté par le régulateur 9 V provisoire (à terme, ce
sera du 12 V), un régulateur 5 V a été rajouté au module relais : le
module EzGoto ne fournit ni assez de tension ni assez de courant. Les
relais 10 A sont surdimensionnés ! Leurs optocoupleurs auraient sans
doute suffi...
- Les 2 commandes des relais sont
reliées (fil jaune) au connecteur 3 broches (broche centrale) du module
EzGoto qui fournit le signal Dual Speeds
.
L'adhésif rouge, sur les
contrôleurs, permet de masquer la Led verte (allumée en permanence)
(mais pas la rouge) pour ne pas perturber l'observation.
Les Leds rouges des contrôleurs ne s'allument qu'en cas de problème ou
de débrayage. Les Leds rouges du module relais s'allument
pendant le suivi : il faudra les masquer...
.
Au démarrage (avec la nouvelle application Ez Goto Dual Speeds : c'est la même procédure. Mais après clic sur engrenage gris, en haut, avant le clic sur M1 Gear Ratio, clic sur Simple speed pour passer en Dual Speed.
Les moteurs se règlent alors en 2 étapes : une première étape à vitesse
rapide (64 micropas) Az puis Alt puis une 2e étape à vitesse normale (256
micropas) Az puis Alt.
De jour, ça fonctionne : Quand on fait un Goto sur un objet,
Le télescope désactive les 2 relais, passe en 64 micropas, vitesse rapide
puis une fois l'objet acquis, quand il passe en mode Goto, il active les
relais pour repasser en mode normal 256 micropas.
Nota : Eric Romer aurait pu faire l'inverse : activer les relais pendant le
Goto, ce qui permettrait d'économiser 150 mA de consommation relais
pendant le suivi...
Nota
: Eric Romer aurait pu passer en 256
micropas avant la fin du pointage, lorsqu'on est très proche de
l'objet, pour améliorer le pointage.
Nota : Je vais remplacer ces 2 gros relais par des optocoupleurs qui eux, ne consomment presque rien...
Nota : Il faut maintenant évidemment, faire des essais de nuit.
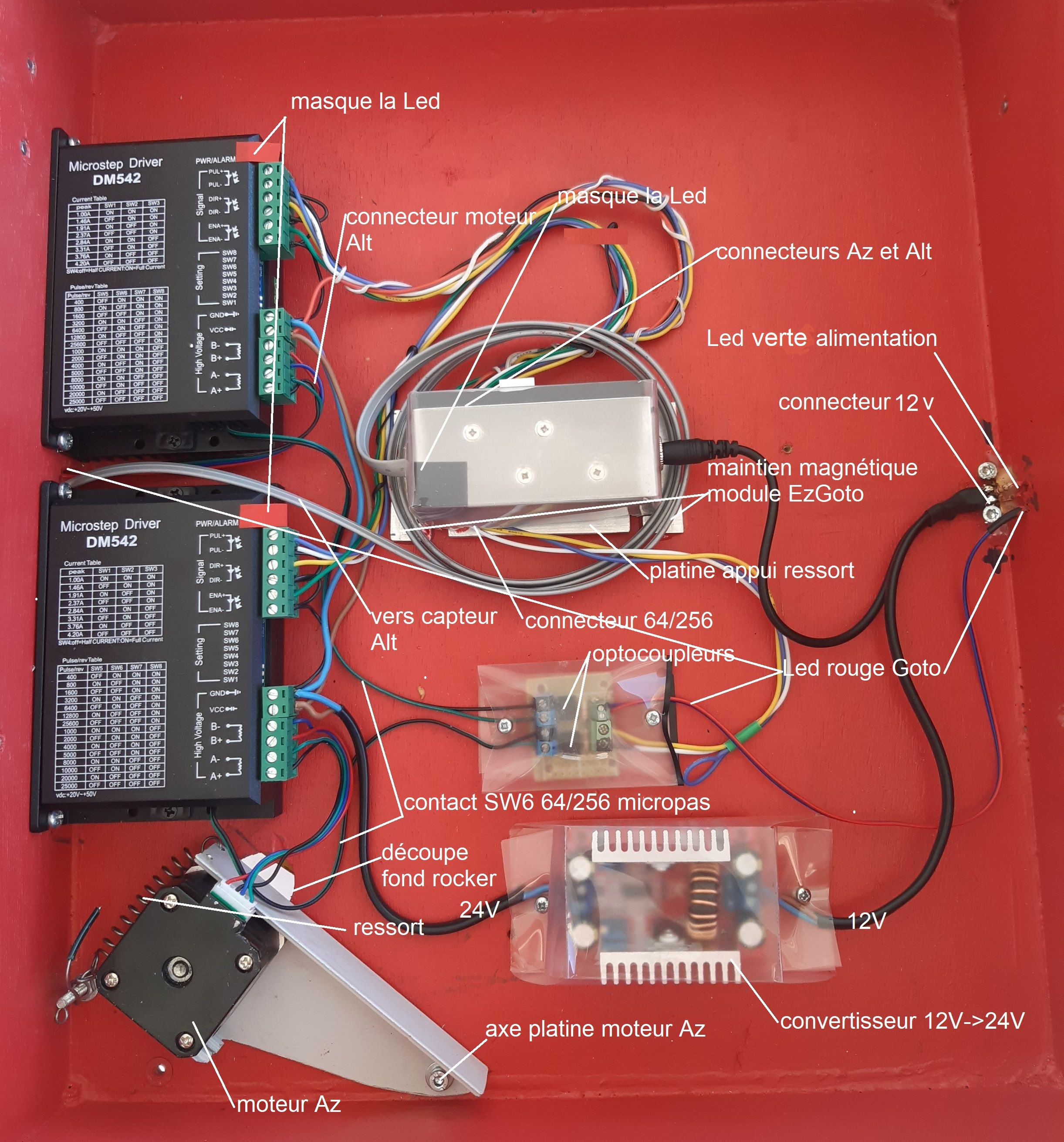
Voilà
! Nous avons remplacé le
module relais par 2 (vieux)
optocoupleurs (4N25 chacun en série avec une résistance de 2.7k).
Résultat : plus besoin d'alimentation, consommation divisée par 100.
Nous
avons installé 2 Leds rouge (qui remplace, en mieux, les "clics" du
relais) sur chaune des faces latérales du rocker (une seule installée
au moment des photos) :
- Leds Goto rouges allumées : le télescope est en mode Goto
- Leds Goto rouges éteintes : le télescope est en mode tracking : l'objet est censé être centré dans l'oculaire
Ces Leds sont très pratiques, on peut
les allumer "assez fort" puisqu'elles ne s'allument que pendant le Goto
et sont éteintes pendant le tracking et l'observation.
On voit, difficilement, cette Led, (celle de gauche, juste au-dessus du connecteur du rocker). (La 2e n'était pas encore montée)
.
Mise en route (AVEC l'option Dual Speeds) :
- Positionner le
télescope sur une surface stable et régler la hauteur des pieds d'après
le niveau à bulle 2 axes pour une base parfaitement horizontale (Axe Az
parfaitement vertical)
- Pointer approximativement le télescope vers l'étoile polaire
- Mettre le télescope sous tension 24 V (le télescope consomme environ 0.25 A et les moteurs sont "bloqués")
- Lancer l'application Android EZ GOTO Dual Speeds (il faut un appareil Android suffisamment rapide)
- Clic sur BLUETOOTH OFF, choisir Romer Optics : l'application affiche BLUETOOTH ON (sinon problème de connexion Bluetooth)
- Clic GPS ON / NEXT
- Clic sur ENCODERS ALT : RIGHT
- Clic sur YES
- Clic sur LEFT SIDE : sur mon télescope, le capteur angulaire ALT est monté à gauche (Je recommande de le monter à droite pour éviter cette étape)
- Clic sur OFFSET / NEXT PAGE
- Clic sur OFFSET
- Clic sur CONTINUE
- Pointer
manuellement soigneusement l'étoile polaire (centrée à l'oculaire) (le
télescope consomme environ 0.1 A et les moteurs sont débrayés)
- Clic sur POLARIS (pointage sur l'étoile polaire) (le télescope consomme environ 0.25 A et les moteurs sont embrayés)
- Le télescope est (à peu près) aligné !
- Clic sur OFFSET / NEXT PAGE
- Clic sur NEXT : le menu multicolore apparaît
- Clic sur engrenage gris, en haut, à droite
- Clic (au milieu en rouge) sur SINGLE MOTOR SPEED : la ligne affiche alors DUAL MOTOR SPEEDS
- Clic sur M1 GEAR RATIO :
le télescope se déplace en Alt et Az en vitesse rapide (relais ou Leds actif) pour calculer le ratio entre les pas
des moteurs et les angles des capteurs en vitesse rapide puis affiche Az Test Completed !, Alt Test Completed !
- Puis le télescope se déplace en Alt et Az en vitesse lente (relais ou Leds éteint) pour calculer le ratio entre les pas
des moteurs et les angles des capteurs en vitesse lente puis affiche Az Test Completed !, Alt Test Completed !
- Il doit afficher (par exemple)
- Az Angle = 5.71° G.R = 25.81110
- Az motor : 0.0006974 °/pulse
- Az Angle = 5.45° G.R = 27.06003
- Az motor : 0.00066652 °/pulse
- S'il n'affiche pas quatre valeurs, il faut recommencer : clic sur M1 GEAR RATIO...sinon problème d'aimants ou de capteurs
- Nota : on est obligé de le refaire chaque fois qu'on lance EZGOTO qui ne mémorise malheureusement pas les valeurs
- Clic sur BACK en haut à gauche pour retourner dans le menu multicolore
Utilisation (AVEC l'option Dual Speeds)
- Depuis le menu multicolore, clic sur Deep Sky Overlook
- Clic sur Messier 45
- Taper 81, OK, pour remplacer Messier 45 par Messier 81 (par
exemple. Ce peut être aussi un NGC ou une étoile de la liste ou des
coordonnées RA/DEC ou un objet du système solaire...)
- Clic long sur Messier 81
- GOTO M81, Confirm to GOTO ?, clic sur GOTO
: l'application affiche la carte du ciel et le télescope active le
relais Dual Speeds (Leds), accélère rapidement vers la galaxie M81, (Cercle orange, jaune puis vert de plus en plus petit),
éteint le relais Dual Speeds (Leds) et passe en mode tracking pour la
suivre...
- Clic à gauche, droite,
au-dessus ou en dessous de la cible, puis clic sur la cible pour
arrêter. Pour affiner le pointage à l'oculaire si besoin
- Une fois l'objet bien centré à l'oculaire, clic long sur le nom de l'objet en haut en bleu
- Clic sur OFFSET : l'application
affiche (par exemple) Zone 5 & 12 were offset (la mire
s'est recentrée sur l'objet et la précision du pointage vient d'être
améliorée)
En mode tracking, la consommation est de l'ordre de 0.5 A.
Nota : On a intérêt de faire un offset chaque fois qu'on pointe un objet dans une zone éloignée des précédentes...
- On peut aussi : Menu, Solar System
- Clic par exemple sur Jupiter
- Clic sur GOTO : le télescope se dirige vers Jupiter puis passe en mode tracking pour suivre
.
Une vidéo de 8 mn avec le mode "Dual Speeds"
Suite à un problème d'offset avec la nouvelle application gratuite EzGoto Dual Speeds,
et après discussion avec Eric Romer; il m'a fourni (le lendemain !) une
nouvelle application Android Dual Speeds avec le problème d'offset
corrigé.
Eric Romer manque un peu de doc mais fournit un très bon support client...
Depuis longtemps, par-dessus le rocker, j'ai posé une feuille plastique
souple qui fait pile la largeur et qui "isole" toute l'électronique de
la poussière, l'humidité...

.
Quand je règle l'horizontalité de la base en vissant ou dévissant les
pieds pour centrer la bulle du niveau 2 axes fixé sur la base, je fais
l'offset sur la polaire, puis un Goto sur Jupiter. Je tombe
systématiquement environ 1° au-dessus. Conclusion, a priori, c'est le
niveau qui est mal réglé (il est réglable).
Méthode pour régler le niveau de jour :
- Poser le télescope sur le sol
- Retirer la jupe en tissu
- Pointer le télescope à la verticale
- Poser un niveau sur le rocker perpendiculairement à l'axe Alt
- Régler l'axe Alt pour amener la bulle pile au milieu et bloquer la rotation Alt
- Faire faire un demi-tour au rocker
- Régler les pieds pour amener la bulle à mi-chemin du milieu
- Régler l'axe Alt pour amener la bulle pile au milieu
- Et ainsi de suite jusqu'à ce que la bulle ne bouge plus après un demi-tour
- Poser un niveau sur le rocker parallèlement à l'axe Alt
- Caler le niveau (cale en papier ou carton) pour amener la bulle au milieu
- Faire faire un demi-tour au rocker
- Régler les pieds pour amener la bulle à mi-chemin du milieu
- Régler les cales pour amener la bulle pile au milieu
- Et ainsi de suite jusqu'à ce que la bulle ne bouge plus après un demi-tour
- Régler le niveau avec les 3 vis cruciformes sur ses deux axes pour centrer parfaitement la bulle.
Conclusion :
De nuit, une fois l'offset corrigé sur Jupiter, après l'avoir centrée
dans un oculaire de 10 mm, il faut environ 45 mn pour qu'elle sorte du
champ, pas de vibrations à l'oculaire, faible bruit de "souffle de ventilateur" : ça marche plutôt bien.
On
peut corriger l'offset facilement et précisément...(clic à côté :
droite, haut gauche ou bas, attendre le centrage puis clic sur la cible)
L'application Android n'est pas très ergonomique mais elle fonctionne bien.
Ce qui manque c'est de pouvoir enregistrer tous les paramètres :
position du capteur, apprentissage moteur.... pour ne pas avoir à le
refaire à chaque fois.
Ceci dit pour refaire tout le processus, il faut 1 ou 2 mn.
A noter que je n'ai pas testé la fonction PEC Encoder qui permet de construire une table de correction de l'angle Azimut.
Je n'ai pas testé la commande du kit par l'application PC Stellarium.
Je n'ai pas testé avec un Iphone.
Je conseille de refaire l'offset chaque fois qu'on pointe un nouvel
objet (surtout s'il est éloigné du précédent) : ça augmente
progressivement la précision du système.
J'ai rajouté un convertisseur 12V -> 24 V qui permet
l'utilisation sur la batterie 12 V de la voiture. En 12V le télescope
consomme, avec mes réglages de moteurs pas à pas, environ 1 A max.
Le
convertisseur, le module EzGoto et la carte optocoupleur ont été
installés chacun dans un "boitier" en plastique semi-rigide transparent
vissé sur le fond pour les protéger de l'humidité, la poussière, les
contacts électriques :
La Led rouge "Goto" est tellement pratique que je
l'ai doublée (après avoir pris la photo ci-dessous) : une 2e Led rouge sur la
face latérale opposée du rocker, entre les 2 contrôleurs.
.
Une vidéo d'un peu plus de 9 mn, commentée, avec le mode "Dual Speeds"
Conclusion :
C'est de loin, je pense, la solution Goto Dobson la moins chère du
marché. (C'est vrai aussi qu'il n'y a pas beaucoup de solutions sur le marché : voir la liste en tout début de page).
à suivre...
http://spt06.perso.libertysurf.fr
Commencé
le
17/06/2022

A jour au 07/12/2022