
Sciences pour tous vous propose des réalisations en électronique, optique, astronomie...
Le fonctionnement des moteurs pas à pas
(difficulté : * très facile)
Pour le suivi équatorial d'un télescope, on utilise généralement un moteur pas à pas qui permet une grande précision de vitesse.
Les moteurs pas à pas :
Grosso modo, un moteur pas à pas est constitué d'un aimant monté sur l'axe de rotation et des bobines fixes disposées autour de l'aimant. Pour atteindre une résolution suffisante : un nombre de pas par tour suffisamment élevé, l'aimant est multipolaire : il est constitué d'un cylindre crénelé Nord Sud Nord Sud...
Un modèle que l'on trouve chez des revendeurs autour de 10 € :
NOTA : il ne faut jamais ouvrir un moteur pas à pas : les aimants peuvent perdre leur puissance et le moteur son couple : un exemple à ne pas suivre...
Les moteurs pas à pas ordinaires ont 200 pas/tour, ils fonctionnent sous des tensions de 5, 12 ou 24 V... avec un courant de l'ordre de 100 mA à plusieurs A. Un moteur pas à pas n'a pas de commutation : c'est un composant simple, très fiable et économique qui permet de générer des vitesses ou des positions précises au prix d'une commande plus compliquée qu'un moteur à courant continu. On en récupère facilement dans les imprimantes, fax, photocopieuses (voir trucs et astuces )
Pour faire tourner un tel moteur, on fait tourner les champs dans les bobines.
Il y a trois types de moteur pas à pas :
- les moteurs 5 fils : 4 bobines reliées à un commun : pour faire tourner le moteur, on relie le commun à l'alimentation et on ferme successivement les 4 bobines en ouvrant les 3 autres.
- Les moteurs 4 fils : 2 bobines sans commun: pour faire tourner le moteur on alimente les bobines dans un sens puis dans l'autre, il faut un montage en pont plus compliqué mais plus efficace
- Les moteurs 6 fils : ce montage permet d'utiliser le moteur en 4 bobines ou en 2 bobines
Un exemple de moteur 4 fils et son électronique de commande :
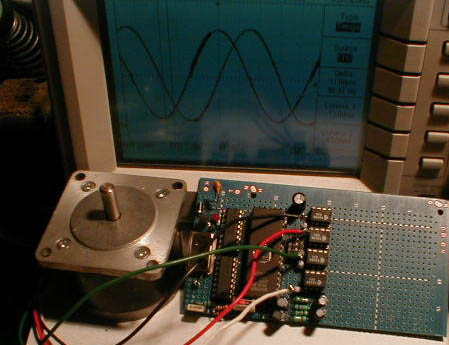
A l'arrêt ou à très faible vitesse, les bobines sont saturées, le courant n'est limité que par leurs résistances : c'est là où le couple du moteur est le plus important et où il consomme le plus. Si la vitesse augmente, la self des bobines cesse d'être négligeable, le courant diminue et le couple aussi. Si on augmente encore la vitesse, le moteur ne peut pas atteindre instantanément cette vitesse : on doit accélérer (et décélérer) progressivement. Si on augmente encore, le moteur décroche et s'arrête.
Il existe de nombreuses astuces et solutions électroniques pour augmenter la vitesse limite du moteur. Sans précaution, il est difficile de dépasser une fréquence de commutation de l'ordre du kHz. Pour aller beaucoup plus vite, il faut un circuit électronique assez évolué et des moteurs adéquats.
Le montage le plus simple pour commander un moteur pas à pas : un commutateur 4 positions sans butée : on relie son commun à la masse, les 4 circuits aux 4 bobines du moteur et le commun du moteur à l'alimentation : quand on tourne le commutateur, le moteur suit, démultiplié.. (intéressant pour des réglages à distance : mise au point, banc optique : on peut par exemple utiliser un 2e commutateur pour sélectionner le moteur à régler et régler 10 moteurs avec ces 2 commutateurs... comme pour régler les bancs optiques que nous utilisons pour nos LASERS)
Pour inverser le sens de rotation d'un moteur pas à pas commandé par du "hardware maison", on peut, bien sur, rajouter des bascules logiques et un tas d'autres bidules compliqués... Mais on peut utiliser aussi un commutateur 2 circuits 2 positions et inverser simple 2 des 4 phases du moteur...
Un montage presque aussi simple : on utilise le port // d'un (vieux) PC, on relie les sortie D0 D1 D2 D3 aux 4 grilles de 4 mosfets MTP3055L, on relie les 4 sources à la masse, les drains à chaque bobine et le commun du moteur à l'alimentation.
Il ne reste plus qu'à écrire en C, Visual Basic, Pascal... un programme pour faire tourner le moteur dans un sens:
0001, 0010, 0100, 1000, 0001...
ou dans l'autre : 0001, 1000, 0100, 0010, 0001... en réglant la temporisation pour régler la vitesse de rotation. On peut même faire du micropas pas soft en hachant en PWM !
Les MTP3055L, IRLR120N ont une résistance élevée pour ne pas charger le port //, ils fonctionnent en 5 V, contiennent une puissante diode inverse et accepte des pics de surtensions comme une zener !
Bien sur, c'est mieux d'utiliser des optocoupleurs, surtout avec le dernier modèle de PC portable à 3 000 €. (http://ftissera.free.fr/Webmel/circuit.html)
Nous avons longtemps piloté les deux moteurs de notre télescope T600 (150 kg de masse mobile) de cette façon, l'électronique rentre dans le boîtier du connecteur // ! (8 transistors CMS)
Sinon, il existe des intégrés plus ou moins évolués comme le MC3479 (Motorola) que l'on relie directement au moteur et à qui on envoie une horloge et le sens de rotation.
Si on veut encore augmenter la résolution du moteur (ou diminuer les vibrations) : au lieu de commander les bobines en tout ou rien, on envoie des tensions continues variables en sinus/cosinus ou l'équivalent en "hachant" la tension : on commande alors le moteur pas à pas en mode micropas
Un excellent site pour piloter son télescope avec des moteurs pas à pas http://ftissera.free.fr/Webmel/altaz.html
Des commentaire ?
Écrivez-nous : 
http://spt06.perso.libertysurf.fr