Sciences pour tous vous propose des réalisations en électronique, optique, astronomie...
Réaliser un moteur hybride précis et rapide
(difficulté : *** moyen)
Pour le suivi équatorial d'un télescope, on utilise généralement un moteur pas à pas qui permet une grande précision de vitesse. Malheureusement, la vitesse maxi d'un moteur pas à pas est limitée (à moins d'utiliser des moteurs très chers et une électronique de pilotage assez évoluée...). Les moteurs à courant continu permettent des vitesses élevées mais pour obtenir un bon suivi, il faut un asservissement de vitesse avec génératrice tachymétrique et, une fois de plus, c'est cher et compliqué.
A SCIENCES POUR TOUS, nous avons voulu développer un moteur hybride avec un moteur pas à pas ET un moteur à courant continu pour avoir précision ET vitesse.
A partir d'un moteur 12 V à courant continu (25.80,HT Radiospares Ref : 321-3186) relativement puissant et un moteur pas à pas 2 bobines 200 pas/t, nous avons testé différentes solutions :
- Les 2 moteurs en "parallèle" (montés sur le même axe mécanique). Pb : Le couple résistant à vide du moteur DC est élevé et le moteur pas à pas a du mal à entraîner le moteur DC. Quand le moteur DC tourne, le moteur pas à pas se transforme en génératrice et il faut impérativement un relais pour l'isoler de son électronique.
- Différentiel : à friction, il y a patinage (gênant pour le mouvement de poursuite), à engrenage des vibrations
- Embrayage électromagnétique : (style grosse photocopieuse ou imprimante laser). Pb: compliqué et il y a toujours un embrayage qui consomme, même en poursuite.
Nous avons donc installé les 2 moteurs en série. 2 solutions :
- Soit le moteur DC est fixe et son axe entraîne la carcasse du moteur pas à pas. Pb : 4 fils pour le collecteur tournant, vitesse du collecteur élevé, risque de vibration de la carcasse du moteur pas à pas à grande vitesse
- Soit le moteur pas à pas est fixe et son axe entraîne la carcasse du moteur DC. Pb : Le collecteur tournant encaisse le courant "élevé" : 3 A du moteur DC.
ATTENTION : pour réaliser ce montage, il faut que le couple "rémanent" du moteur DC soit très important (ce qui est le cas de notre moteur Radiospares) et supérieur au couple d'entraînement du télescope en poursuite. Il faut aussi que le couple de maintien du moteur pas à pas soit supérieur au couple d'entraînement du réducteur en vitesse rapide, sinon, en vitesse rapide, ce n'est plus l'axe du moteur à courant continu qui tourne mais la carcasse du moteur DC et l'axe du moteur pas à pas qui tourne à l'envers !
Dans les 2 solutions, il faut alimenter le moteur dont la carcasse tourne. Pour ça, il faut réaliser un collecteur (ou joint) tournant.
Nous avons choisi la 2e solution plus simple ! Il nous faut donc réaliser un collecteur tournant 2 contacts 3 A environ. Ce collecteur encaisse le courant du moteur DC mais la vitesse du moteur pas à pas (limitée à quelques t/mn en poursuite)
NOTA: la 2e solution offre un autre avantage plus subtil : le moteur pas à pas entraîne la monture "à travers" le couple rémanent magnétique du moteur DC: les vibrations du moteur pas à pas sont filtrées par ce couplage magnétique (et par l'inertie du moteur DC).
Réalisation du collecteur tournant :
Nous avons testé des roulements à billes pour faire passer le courant par les billes (un peu comme dans les collecteurs tournant des enrouleurs de câble d'aspirateur qui utilisent des rouleaux à aiguilles). Paradoxalement, beaucoup de petits roulements à billes ne transmettent pas le courant, même en forçant (faites le test !). Nous avons réalisé un collecteur avec 2 plaques de circuit imprimé en cuivre entre lesquelles roulent 2 fois 3 billes de roulement. Les contacts sont sporadiques et pas très bons.
Nous avons alors réalisé un collecteur tournant concentrique, en circuit imprimé, sur lequel frottent 2 "charbons" récupérés sur un moteur à courant continu.
Pour obtenir une résistance de contact suffisamment basse, il ne faut pas étamer le cuivre sur lequel frottent les charbons...
Le système fonctionne correctement, la résistance électrique est très faible. Ça devrait même s'améliorer avec l'usure des charbons. Nous pensons que l'usure et l'oxydation des pistes en cuivre ne posera pas de problème à long terme..
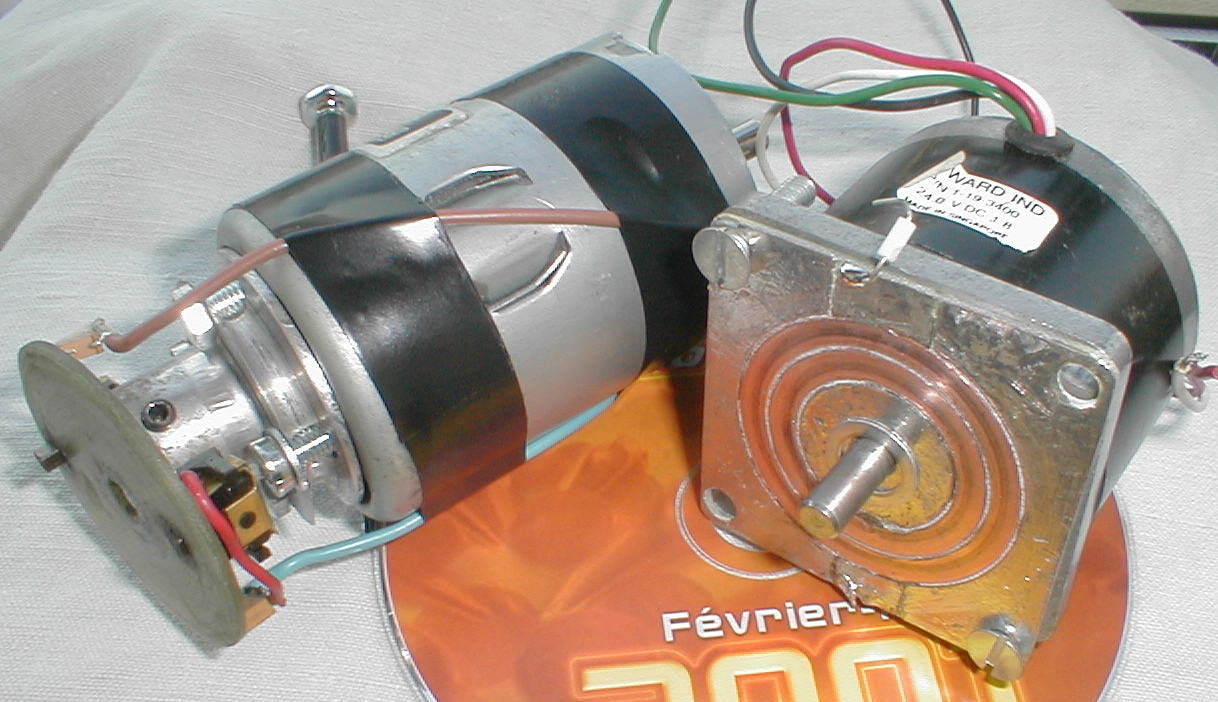
Sur la photo ci-dessus (le CD-ROM donne l'échelle), à gauche, la partie tournante du moteur hybride : le moteur Radiospares (on distingue l'axe qui sera relié au réducteur du télescope), des adhésifs pour éviter que les fils ne bougent quand la carcasse du moteur tourne. Une poulie modifiée reliée à la carcasse du moteur et un circuit imprimé découpé en rond sur lequel est collé 2 porte-balais et les "charbons" récupérés sur un autre moteur DC.
A droite la partie fixe : un circuit imprimé rectangulaire étamé, sauf sur les bandes de roulement (les pistes ont été creusées mécaniquement). Sous le circuit, une astuce permet de se connecter à la piste intérieure sans sur-épaisseur. La rondelle permet d'éviter le frottement par contact direct entre les 2 circuits imprimés.
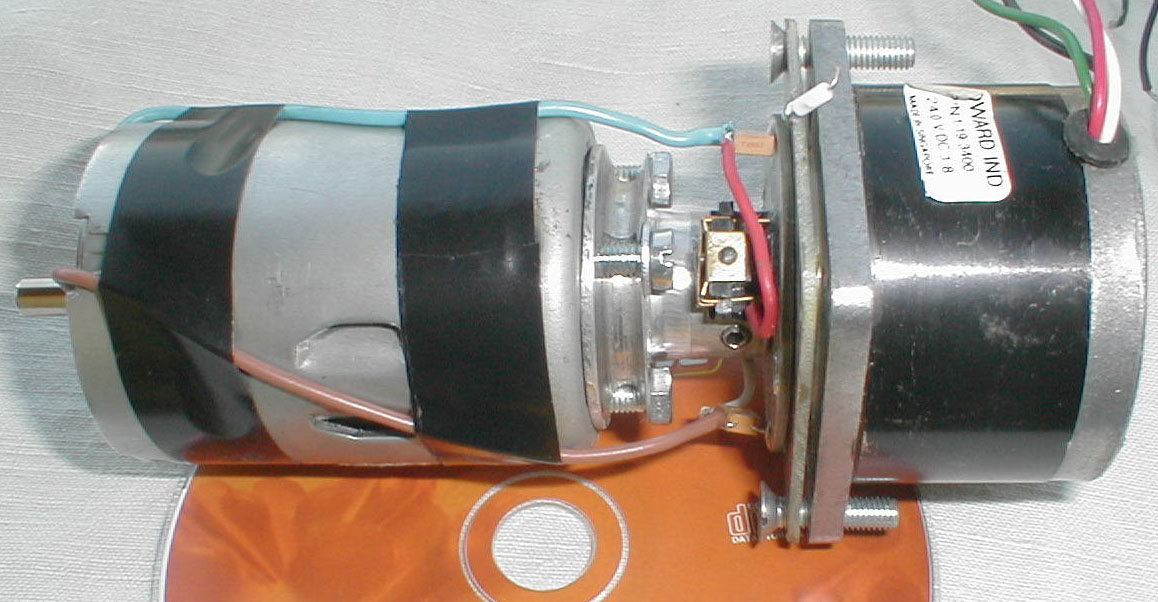
Sur la photo ci-dessus (le CD-ROM donne l'échelle), le moteur hybride assemblé : de gauche à droite : l'axe du moteur continu qui sera relié au réducteur du télescope, la carcasse tournante du moteur DC, entraînée, via la poulie modifiée, par le moteur pas à pas, on voit un porte-balai (relié au fil rouge). La connexion électrique au moteur DC se fait au niveau du strap blanc.
Maintenant pour parcourir 90° avec la monture, nous mettons 15 s ou lieu de 5 mn...
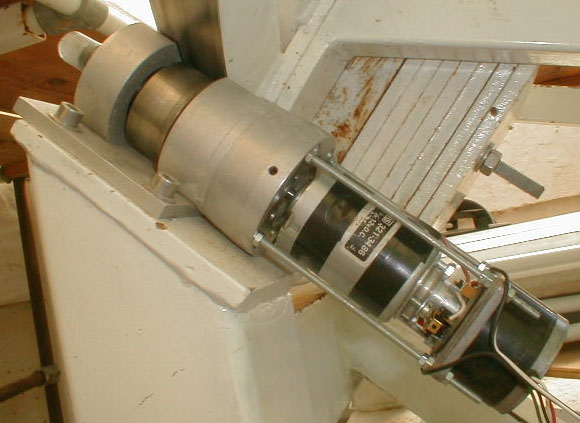
Le moteur hybride installé sur le télescope : de droite à gauche : le moteur pas à pas fixé par des tiges filetées, le joint tournant, le moteur DC, le réducteur elliptique "Harmonic Drive" 1/110, le galet d'entraînement d=54 mm et la couronne équatoriale (D=1400 mm de diamètre). En arrière-plan, les contrepoids d'équilibrage...
Des commentaires ? Écrivez-nous :

http://spt06.perso.libertysurf.fr